Διαδρομή και Προσανατολισμός μέσω Bee-bot, Google Earth και Ladybug Maze
Submitted by ltme on Mon, 12/09/2013 - 10:46
Χωρικός Συλλογισμός
Ως χωρικό συλλογισμό (spatial thinking) ορίζουμε την διαδικασία με τη βοήθεια της οποίας σχηματίζουμε ιδέες για τις ιδιότητες και σχέσεις στο χώρο, τις αναπαριστούμε με πραγματικές και νοερές εικόνες και τέλος τις διαχειριζόμαστε για την αντιμετώπιση καταστάσεων (Τζεκάκη, 2011). Επίσης, ως χωρική νοημοσύνη ορίζεται η νοημοσύνη με την οποία το παιδί αντιλαμβάνεται το χώρο και τα αντικείμενα μέσα σ’αυτόν, τις ιδιότητες, τις σχέσεις που τα χαρακτηρίζουν και του δίνει την δυνατότητα να οργανώσει νοερές αναπαραστάσεις ή πρακτικές για την καταγραφή ή επεξεργασία τους (Gardner, 1983). Ο χωρικός συλλογισμός περιλαμβάνει τα εξής στοιχεία: α) την αντίληψη, β) κατανόηση, γ) παράσταση θέσεων, δ) αμοιβαίων σχέσεων, διευθύνσεων και διαδρομών μέσα στο χώρο και ε) τη διαχείριση κάθε χωρικής πληροφορίας και τις αλλαγές της (Τζεκάκη, 2011). Στη συγκεκριμένη εργασία, θα επικεντρωθούμε στο πως τα παιδιά προσχολικής ηλικίας προσανατολίζονται στο χώρο (διαδρομές) με τη βοήθεια διάφορων ψηφιακών μέσων (Google earth, Bee-bot & περιβάλλοντα logo, όπως το Lady bug).
Έρευνες έχουν δείξει ότι τα παιδιά είναι σε θέση να διακρίνουν που βρίσκεται ένα αντικείμενο σε σχέση με τον εαυτό τους αρχικά και μετέπειτα με άλλα αντικείμενα, τι διεύθυνση έχουν και ποια διαδρομή είναι απαραίτητη για την προσέγγισή τους. Επίσης, είναι σε θέση να κάνουν νοερούς μετασχηματισμούς και να προβλέψουν ή να αναπαραστήσουν τις αλλαγές που προκύπτουν. Η χωρική σκέψη συνδέεται στενά με την οπτικοποίηση ή όπως αλλιώς λέγεται οπτικοποιημένη σκέψη. Έτσι, για τον προσανατολισμό στο χώρο το παιδί θα πρέπει να: α) κατανοεί, επεξεργάζεται και να αναπαριστά θέσεις, διευθύνσεις και διαδρομές σε οργανωμένα και μη περιβάλλοντα. β) κατανοεί, επεξεργάζεται και να αναπαριστά θέσεις, διευθύνσεις και διαδρομές με τη χρήση συντεταγμένων. Όσο αναφορά, την οπτικοποιημένη σκέψη και τον χωρικό συλλογισμό το παιδί θα πρέπει να: α) αναγνωρίζει και να αναπαριστά σχήματα ή καταστάσεις από διαφορετικές οπτικές γωνίες β) κατασκευάζει ή να σχεδιάζει σχήματα και καταστάσεις από μνήμης ή να κάνει λεκτικές περιγραφές και να προσεγγίζει χάρτες (Τζεκάκη, 2011). Σύμφωνα με τον Piaget (1978), το παιδί αναπτύσσει τις έννοιες με μια συγκεκριμένη ιεραρχική σειρά: α) Τοπολογικές έννοιες, β) Προβολικές έννοιες, γ) Ευκλείδειες και Μετρικές έννοιες. Σύμφωνα με παλαιότερες έρευνες, που εστιάζουν στην χωρική γνώση επιβεβαιώνεται η περιορισμένη ικανότητα των παιδιών να συντονίσουν με επιτυχία χωρικές πληροφορίες. Από την άλλη μεριά, νεότερες έρευνες έχουν δείξει ότι ανάλογα με την κατάσταση τα παιδιά υιοθετούν περισσότερες από μία χωρικές προσεγγίσεις (Newcomb & Huttenlocher, 2000). Έτσι, τα παιδιά μεγαλώνοντας προσεγγίζουν θέσεις και διευθύνσεις στο χώρο, κατηγοριοποιούν χωρικές πληροφορίες ή απομνημονεύουν και αναπαριστούν χωρικά δεδομένα (Clements, 1999).
Σχετικά, με τον χωρικό προσανατολισμό που αφορά την τοποθέτηση και την κίνηση σε σχέση με διάφορες θέσεις στο χώρο, παρατηρείται ότι σε ένα πρώτο στάδιο το παιδί προσανατολίζεται με κέντρο τον εαυτό και τη θέση του, αλλά όσο μεγαλώνει μπαίνει στη διαδικασία να προσανατολιστεί με αλλοκεντρικά συστήματα ή ακόμα και να μπορεί να προσανατολιστεί σ’ένα χάρτη (Τζεκάκη, 2011). Από τις διάφορες έρευνες που έχουν πραγματοποιηθεί προκύπτει, ότι οι δραστηριότητες που αφορούν την έννοια του προσανατολισμού, θα πρέπει να οδηγούν τα παιδιά να προσανατολίζονται ως μια ποικιλία συστημάτων αναφοράς που κινείται σταδιακά από τα αλλοκεντρικά στα πιο γενικευμένα. Αυτά τα συστήματα- πλαίσια αναφοράς χωρίζονται στα οργανωμένα και στα μη οργανωμένα. Οι Newcombe και Huttenlocher (2000), εισάγουν τον όρο «κωδικοποίηση» για να χαρακτηρίσουν τη χωρική πληροφορία τοποθέτησης ή κίνησης που έχει το παιδί στο μυαλό του όταν δρα σ’ένα οργανωμένο πλαίσιο- περιβάλλον.
Η γλώσσα για τις χωρικές σχέσεις αποκτάται με μία συνεπή σειρά, ακόμα και σε διαφορετικές γλώσσες (Bowerman, 1996). Οι πρώτοι όροι που έχουν σχέση με τον προσανατολισμό και κατακτά ένα παιδί, συνήθως είναι το «μέσα», «επάνω» και «κάτω από» μαζί με αυτές τις έννοιες που αφορούν την κατευθυντικότητα, είναι το «πάνω-κάτω». Αυτές οι αρχικές έννοιες αναφέρονται σε μετασχηματισμούς που «αναγκάζεται» το παιδί να κατακτήσει για την κατανόηση του προσανατολισμού. Στη συνέχεια, σ’ένα ανώτερο επίπεδο τα παιδιά μαθαίνουν κάποιες λέξεις εγγύτητας, όπως είναι το «δίπλα» και το «μεταξύ». Αργότερα, μαθαίνουν λέξεις οι οποίες αναφέρονται σε πλαίσια αναφοράς, όπως το είναι το "μπροστά" και το "πίσω". Τέλος, όσο αναφορά τις λέξεις "αριστερά" και "δεξιά" είναι έννοιες τις οποίες το παιδί τις μαθαίνει πολύ αργότερα, και είναι η πηγή της σύγχυσης στα παιδιά για αρκετά χρόνια (CFE, 2009). Τα παιδιά μέσα από τις δραστηριότητες θα πρέπει να ορίσουν τα ίδια κάποιο σύστημα αναφοράς εκτός από τον εαυτό τους. Με βάση ένα διαφορετικό σύστημα αναφοράς τα παιδιά τοποθετούν αντικείμενα «μπρος-πίσω» και «δεξιά-αριστερά» με βάση το σημείο αναφοράς που έχουν ορίσει (Τζεκάκη, 2011).
Μέτρηση
Μέτρηση ενός μεγέθους είναι μια διαδικασία κατά την οποία το μέγεθος συγκρίνεται με ένα πρότυπο που χρησιμοποιείται ως μονάδα μέτρησης και προσδιορίζεται ένα αριθμητικό αποτέλεσμα που συνδέει τις φορές των επαναλήψεων που έχουν προκύψει από την μέτρηση (Τζεκάκη, 2011). Οι αυθόρμητες συγκρίσεις που κάνουν τα παιδιά για την μέτρηση είναι βοηθητικές για την αρχική κατανόηση της έννοιας της μέτρησης (Bragg & Outhred, 2004). Για να μπορέσει το παιδί να υπολογίσει μια απόσταση και πόσα βήματα πρέπει να κάνει, θα πρέπει να έχει κατακτήσει την έννοια της μέτρησης. Έτσι, για να εισαχθεί το παιδί στη διαδικασία της μέτρησης χρειάζεται να προσεγγίσει εννοιολογικά: 1) το μετρούμενο μέγεθος και 2) την αμεταβλητότητα του μεγέθους καθώς και να διακρίνει την ισότητα και την ανισότητα των μεγεθών. Την μονάδα μέτρησης μπορούμε να την ορίσουμε μαζί με τα παιδιά για να την κατανοήσουν και αυτά με ένα εύκολο τρόπο. Για παράδειγμα, ως μονάδα μέτρησης μπορούμε να ορίσουμε την παλάμη μας, ένα κορδόνι ή ένα ξυλάκι. Με αυτά τα μέσα, το παιδί κατανοεί πιο εύκολα την έννοια της μέτρησης. Σημαντική είναι η έννοια της επανάληψης στη μέτρηση (Τζεκάκη, 2011). Έχοντας ορίσει μια μονάδα μέτρησης με τα παιδιά (π.χ. την παλάμη), θα πρέπει τα παιδιά να μας πούν πόσες φορές θα βάλουμε την παλάμη μας για να μετρήσουμε μια διαδρομή. Αυτή η διαδικασία μας δείχνει ότι μέσα από άτυπες διαδικασίες προσπαθούμε να οδηγηθούμε στις τυπικές διαδικασίες που θα επιτρέψουν στα παιδιά να προσεγγίσουν τις τεχνικές, εργαλεία ή κανόνες που θα τους βοηθήσουν να μετράνε με τις συμβατικές μονάδες μέτρησης (Strutchens, Martin & Kenney, 2003).
Σύμφωνα με τα σύγχρονα προγράμματα για τη μέτρηση μήκους το παιδί θα πρέπει:
α) Να κάνει άμεσες συγκρίσεις και μεταφορά μεγεθών σε άλλα μέσα.
β) Να κάνει έμμεσες συγκρίσεις με τη χρήση αυθαίρετων και συμβατικών μονάδων.
γ) Να κάνει επικαλύψεις και μετρήσεις αυθαίρετων μέσων.
δ) Να κάνει επαναλήψεις των μονάδων και να συνδέει το αποτέλεσμα με αριθμούς.
ε) Να πραγματοποιεί εκτιμήσεις για αποστάσεις ή μήκη. (Τζεκάκη, 2011, σ: 242).
Σε ερευνά του ο Battista (2003), παρατήρησε ότι τα παιδιά όσον αναφορά τη μέτρηση αρχικά, εκτιμούν μια απόσταση χωρίς κριτήρια ή χρησιμοποιούν δικά τους αυθαίρετα κριτήρια (άτυπες μονάδες μέτρησης), στη συνέχεια, προχωρούν σε μια τμηματική σύγκριση όπου χωρίζουν την απόσταση σε τμήματα και κάνουν πάνω σ’αυτή συγκρίσεις και τέλος, συγκρίνουν με βάση κάποια σαφή κριτήρια παράλληλης τοποθέτησης με κοινή αρχή.
Εκπαιδευτική Ρομποτική και Νήπια
Στις μέρες μας έχει αυξηθεί το ενδιαφέρον και η ζήτηση της εισαγωγής των Η/Υ στην εκπαιδευτική διαδικασία. Η χρήση της Ρομποτικής υποστηρίζει αυτή την ένταξη της τεχνολογίας στο σχολικό πλαίσιο, μέσω της οποίας παρατηρείται ενεργή συμμετοχή των παιδιών σε ουσιαστικά έργα (Bers, Ponte, Juelich, Viera & Schenker, 2002). Η Εκπαιδευτική Ρομποτική προσφέρει μια πληθώρα πλεονεκτημάτων και οφελών τόσο στα παιδιά όσο και στον εκπαιδευτικό, κάτι που συμβάλλει στο να θεωρείται ένα χρήσιμο μαθησιακό εργαλείο, το οποίο βοηθά στην ενίσχυση της μάθησης και της ανάπτυξης της σκέψης του μαθητή (Alimisis, Moro, Arlegui, Frangou & Papanikolaou, 2007).
Αναφορικά με τους μαθητές, μέσω της Ρομποτικής τα παιδιά όλων των ηλικιών μπορούν να αποκτήσουν γνώσεις σχετικές με τη μηχανική και τον προγραμματισμό καθώς και να μάθουν πώς να εφαρμόζουν τα μαθηματικά για την επίλυση αληθινών προβλημάτων και καταστάσεων (Bers, 2007). Όσον αφορά τους εκπαιδευτικούς, η ρομποτική παρέχει ένα ανοιχτό περιβάλλον για αυτούς, που επιτρέπει να αναπτύξουν ένα καινοτόμο πρόγραμμα δραστηριοτήτων που εμπλέκει άμεσα την τεχνολογία και την συνδυάζει με άλλα γνωστικά αντικείμενα. Δηλαδή, δίνονται κίνητρα στους μαθητές να συμμετέχουν στα μαθηματικά, ακόμα και αν τα ίδια τα παιδιά δεν θεωρούν τους εαυτούς τους «καλούς» σε αυτό το αντικείμενο (Bers & Urrea, 2000). Ακόμη, τα ρομπότ παρέχουν ένα εποικοδομητικό περιβάλλον μάθησης, στο οποίο ο εκπαιδευτικός μπορεί να χειριστεί επιστημονικές έννοιες με πιο κατανοητό τρόπο για τα παιδιά (Demo, 2008). Επίσης, βοηθάει τους μαθητές να καλλιεργήσουν τη σκέψη τους στην αναζήτηση εναλλακτικών και πρωτότυπων λύσεων όταν πρόκειται να επιλύσουν κάποιο πρόβλημα. Οι μαθητές/τριες μέσα από τη βιωματική εμπλοκή μαθαίνουν έννοιες, αποκτούν στρατηγικές για να λύσουν πραγματικά προβλήματα που έχουν νόημα για αυτούς (Bers & Portsmore, 2005). Ακόμη, η χρήση της Ρομποτικής μπορεί να παρέχει μια παιγνιώδη γέφυρα ανάμεσα στην ενσωμάτωση των μαθηματικών και της τεχνολογίας ανάμεσα στα προσωπικά έργα των παιδιών (Bers, 2007). Τα παιδιά μέσα από την πράξη μαθαίνουν πιο εύκολα μαθηματικές έννοιες και τέλος καλούνται σε κοινωνικές αλληλεπιδράσεις που μέσω του παιχνιδιού συντελείται μάθηση (Resnick, 2003).
Παρά τα οφέλη που παρέχει η Ρομποτική στην εκπαίδευση, η έρευνα έχει δείξει τη δυσκολία εισαγωγής των νέων μέσων της τεχνολογίας στην εκπαιδευτική διαδικασία. Αυτό συμβαίνει εξαιτίας της αρνητικής στάσης των εκπαιδευτικών απέναντι στους υπολογιστές και τις δυνατότητες των Νέων Τεχνολογιών (Bers, 2007. Bers & Portmore, 2005). Πέρα από την αρνητική στάση που πιθανώς να έχουν, υπολείπονται γνώσεων, δεξιοτήτων, εμπειρίας και κατάλληλης κατάρτισης (Bers, Ponte, Juelich, Viera, & Schenker, 2002. Bers & Portmore, 2005). Αν και η περισσότερη δουλειά με δραστηριότητες ρομποτικής έχει γίνει στις μεγαλύτερες τάξεις των σχολείων, δηλαδή σε Γυμνάσια και Δημοτικά, η σύγχρονη έρευνα έστρεψε την προσοχή της στη χρήση της Ρομποτικής στην προσχολική κιόλας ηλικία (Cejka, Rogers & Portsmore, 2006). Αν και τα παιδιά προσχολικής ηλικίας είναι σε θέση να κατανοήσουν τις βασικές έννοιες προγραμματισμού και κατασκευαστικές στρατηγικές που απαιτούν τα ρομποτάκια, τα περισσότερα προγράμματα προσχολικής εκπαίδευσης δεν μπορούν να παρέχουν μια σωστή και κατάλληλη υποστήριξη (Bers, 2007). Η Ρομποτική λοιπόν, αν και αποτελεί μια καινοτομία στο χώρο της εκπαίδευσης, δεν περιλαμβάνεται στο επίσημο πρόγραμμα σπουδών της ελληνικής σχολικής εκπαίδευσης (Καρατράντου, Τάχος & Αλιμήσης, 2005), αλλά χρησιμοποιείται κυρίως σε ιδιωτικά σχολεία της Αθήνας (π.χ. Δούκας και Κολέγιο Ψυχικού) (Alimisis, et. al., 2007). Όμως, τα τελευταία χρόνια, παρατηρείται η αύξηση της χρήσης των Νέων Τεχνολογιών στην εκπαίδευση και όπως υποστηρίζουν οι Webb & Cox (2004), με τη χρήση της τεχνολογίας στην ευρύτερη εκπαίδευση (ιδιωτικά και δημόσια σχολεία) έχει αλλάξει ο τρόπος διδασκαλίας, καθώς δίνεται η δυνατότητα να οικοδομήσουν μόνοι τους τα δικά τους γνωστικά μοντέλα, να εμπλακούν σε συνεργατική μάθηση, να επιλύσουν προβλήματα και τέλος να συμμετέχουν ενεργητικά στη μάθηση.
Ενώ παλαιότερα, οι εκπαιδευτικοί σχεδίαζαν δραστηριότητες για να βοηθήσουν τα παιδιά να αναπτύξουν μια βαθύτερη κατανόηση των μαθηματικών εννοιών, όπως για παράδειγμα των αριθμών, του μεγέθους ή και των σχημάτων (Bers, 2007), τώρα παρέχονται στα παιδιά σύγχρονα περιβάλλοντα που τους επιτρέπουν τη μάθηση μέσα από τον πειραματισμό και την εξερεύνηση νέων μέσων (Bers, et. al., 2002). Οι εκπαιδευτικές εφαρμογές της Τεχνολογίας βασίζονται στη κοστρουξιονιστική λογική, με έμφαση σε δραστηριότητες που προάγουν βιωματική μάθηση μέσα από ρεαλιστικές συνθήκες (Κούριας, 2009). Ο Κονστρουξιονισμός (Constructionism) ως αρχή δίνει ιδιαίτερη σημασία στο γεγονός ότι τα παιδιά μαθαίνουν καλύτερα όταν τα ίδια εμπλέκονται στο σχεδιασμό και την κατασκευή προσωπικών συνθηκών εξερεύνησης (Papert, 1980). Τα περιβάλλοντα που στηρίζονται σε αυτή την αρχή βοηθούν τα παιδιά να μάθουν βιώνοντας ενεργά την έρευνα και να εμπλέκονται σε καταστάσεις που απαιτούν την επίλυση προβλημάτων, συνεργασία με την ολομέλεια της τάξης και πάρσιμο αποφάσεων (Rogers, Kearns, Rogers, Barsosky & Postsmore, 2001).
Στην αγορά είναι διαθέσιμοι διάφοροι τύποι προγραμματιζόμενων ρομπότ κατάλληλα για τις διάφορες ηλικιακές ομάδες παιδιών και μαθησιακά επίπεδα (Alimisis, et. al, 2007). Για παράδειγμα, κυκλοφορούν πολύ απλά εργαλεία προγραμματισμού, τα οποία δεν χρειάζονται από το παιδιά κάποια συναρμολόγηση, όπως το Bee-Bot, που συνήθως δίνεται στα παιδιά προσχολικής ηλικίας (Demo, 2008). Κυκλοφορούν και άλλα εργαλεία, όπως το Lego Mindstorms ή το Scribbler, που έχουν πιο πολύπλοκα χαρακτηριστικά και μοιάζουν περισσότερο με ρομπότ. Όποιο ρομπότ και να διαλεχτεί σας εργαλείο μάθησης, τα παιδιά ανακαλύπτουν καθημερινά φαινόμενα αντλημένα από τη καθημερινότητά τους εντός και εκτός τάξης (Alimisis, et. al., 2007).
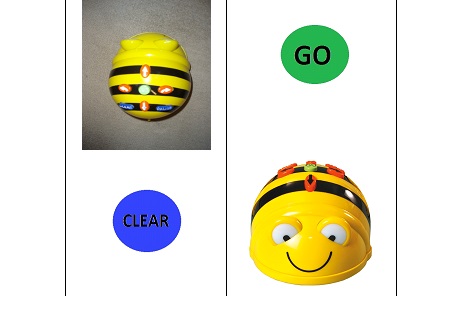
Στην παρούσα έρευνά μας, θα ασχοληθούμε με την προγραμματιζόμενη συσκευή Bee-Bot. To Bee-Bot είναι μια μικρή προγραμματιζόμενη συσκευή - παιχνίδι, η οποία μπορεί να εκτελέσει μια σειρά από βήματα προγραμματιζόμενη με συγκεκριμένη σειρά εντολών, οι οποίες μπορούν να εκτελεστούν ακόμη και από ένα μικρό παιδί. Όπως υποστηρίζει η Pekárová (2008), το παιχνίδι αυτό έχει βραβευτεί ως το πιο εντυπωσιακό υλικό για το νηπιαγωγείο και τις πρώτες τάξεις του Δημοτικού στην παγκόσμια εκπαιδευτική αγορά της τεχνολογίας. Όσο αφορά την εξωτερική του εμφάνιση, μοιάζει με μια μεγάλη μέλισσα με μαύρες ρίγες που στο πάνω μέρος του σώματός της έχει χρωματιστά κουμπιά. Το κάθε κουμπί από αυτά αντιστοιχεί σε εντολές για κίνηση προς εμπρός, πίσω, δεξιά ή αριστερά. Επίσης, υπάρχουν άλλα τρία κουμπιά, το κουμπί «GO» που πατώντας το ξεκινάει να εκτελεί τη σειρά των οδηγιών, το κουμπί «PAUSE» που σταματά για κάποια δευτερόλεπτα και τέλος το κουμπί «CLEAR» που λειτουργεί σαν την ιδέα της μνήμης που αποθηκεύει τις οδηγίες και πατώντας το, σβήνει τις εντολές που δόθηκαν (Demo, 2008). Τα παιδιά σε αυτή την ηλικία δεν μπορούν να γράφουν καλά, αλλά είναι σε θέση να χρησιμοποιούν την εικονική γλώσσα που μέσω αυτής της συσκευής είναι διαθέσιμη με τη μορφή των κουμπιών που υπάρχουν πάνω στο μελισσάκι. Ο τρόπος που τα παιδιά ελέγχουν το Bee-Bot είναι απλός: πατούν τα βελάκια που υπάρχουν πάνω του ανάλογα την κατεύθυνση που θέλει να πάει και στη συνέχεια πατούν το πράσινο κουμπί «GO» (Pekárová, 2008).
Έρευνες έχουν καταδείξει τα οφέλη που παρέχει η χρήση του Bee-Bot στα παιδιά, καθώς μπορεί να τους αναπτύξει τη δεξιότητα γραφής και ανάγνωσης, δεξιότητες μαθηματικών, γεωγραφίας, φυσικών επιστημών, ακόμη και ιστορίας (Pekárová, 2008). Πιο συγκεκριμένα, οι Newby, Stepich, Lehman & Russell (2006) υποστηρίζουν πως το Bee-Bot μπορεί να χρησιμοποιηθεί ως ένα χρήσιμο μέσο εξοικείωσης των παιδιών με το αλφάβητο. Με τη χρήση του αλφαβητικού χάρτη και της κίνησης του Bee-Bot πάνω σε αυτόν, παρατηρήθηκε ότι τα παιδιά έμαθαν καλύτερα τα γράμματα. Επίσης, τα μέλη του Queensland College of Teachers (2007) που χρησιμοποίησαν στην εκπαιδευτική τους διαδικασία το Bee-Bot, παρατήρησαν ότι με τη χρήση του, πολλοί εκπαιδευτικοί ξεκίνησαν με ενθουσιασμό να κατασκευάζουν δικούς τους χάρτες και τους ενέταξαν επιτυχώς στις τάξεις τους. Επιπροσθέτως, σε μια έρευνα των Beraza, Pina & Demo (2010), παρατήρησαν πως με τη χρήση της μικρής μέλισσας αναπτύχθηκαν στα παιδιά συγκεκριμένες δεξιότητες, όπως για παράδειγμα δεξιότητες υπολογισμού και λογικής σκέψης, στρατηγικές επίλυσης τοπολογικών προβλημάτων (δηλαδή το «δικό μου δεξιά», «το δικό του δεξιά») και μάθηση των αριθμών. Όπως υποστηρίζουν οι Καρατράντου, Τάχος & Αλιμήσης (2005), τα αποτελέσματα της χρήσης του Bee-Bot μπορούν να επηρεαστούν από τα ενδιαφέροντα, τον χρόνο, τις προτιμήσεις καθώς και την προηγούμενη εμπειρία των παιδιών σε νέα μέσα τεχνολογίας. Γενικότερα όμως, μέσα από τη βιβλιογραφική ανασκόπηση παρατηρήσαμε πως η χρήση της προγραμματιζόμενης αυτής συσκευής αποφέρει μόνο θετικά αποτελέσματα στο χώρο της προσχολικής εκπαίδευσης, καθώς θεωρείται ως ένα χρηστικό εργαλείο μάθησης για τα παιδιά (Demo, 2008). Άλλο ένα περιβάλλον που δημιουργεί «νέους τρόπους σκέψης» είναι τα περιβάλλοντα της Logo. Χαρακτηριστικό παράδειγμα τέτοιας εφαρμογής είναι η χελώνα- ρομπότ, η οποία βρίσκεται σε ένα εικονικό περιβάλλον που η συμπεριφορά της είναι μια εικονική αναπαράσταση της πραγματικής της συμπεριφοράς. Η χελώνα αυτή βοηθά τα παιδιά να σκέφτονται για την επίλυση προβλημάτων έχοντας ως μεταβλητές με το χρόνο, το διάστημα, την ταχύτητα σε σχέση με την πραγματική κίνηση (Alimisis, et. al., 2007).
Διδακτικό Πείραμα
Η εκπαίδευση των μαθηματικών είναι μια πειραματική επιστήμη. Απο πολλούς αποκαλούνται ως πειραματικά μαθηματικά. Το διδακτικό πείραμα, είναι ένα πειραματικό εργαλείο μέσα από το οποίο, ο δάσκαλος-ερευνητής επιδιώκει απαντήσεις στα διδακτικά ερωτήματα που έχει θέσει εξαρχής και μέσα από τα οποία διερευνά την ανάπτυξη της μαθηματικής σκέψης των μαθητών του για διάφορες έννοιες (Czarnocha & Maj, 2007). Το «Διδακτικό Πείραμα» αποτελεί εναλλακτική προσέγγιση για τη μελέτη της διδακτικής παρέμβασης υιοθετώντας μια ανθρωποκεντρική σκοπιά μεθοδολογίας προσανατολισμένη στην διερεύνηση της ανάπτυξης και της διαπραγμάτευσης των νοημάτων που κατασκευάζουν και παράγουν τα δρώντα υποκείμενα σε συγκεκριμένα εκπαιδευτικά πλαίσια. Αυτή η προσέγγιση υποστηρίζει την ανάγκη πειραματισμού στο χώρο της διδακτικής και παράλληλα ευνοεί την αναζήτηση διαλογικής σχέσης μεταξύ θεωρίας και πράξης (Χρονάκη, 2007, σ.1). Ως μεθοδολογία αναπτύσσει την ανάγκη μελέτης της ίδιας της διαδικασίας ανάπτυξης της μάθησης και όχι απλά του αποτελέσματός που προκύπτει από αυτή. Για τους δασκάλους, το διδακτικό πείραμα είναι η έρευνα στηντάξη και κατ’ επέκταση η έρευνα της μαθησιακής διαδικασίας για τη βελτίωση της μάθησης στην ίδια την τάξη (Czarnocha & Prabhu, 2006). Το «Διδακτικό Πείραμα» στην τάξη αποτελεί ένα πειραματικό πλαίσιο όπου το υποκειμένο που λαμβάνει μέρος στην έρευνα βρίσκεται σε ένα πλούσιο δομημένο περιβάλλον, το οποίο μπορεί να μεταβληθεί αναλόγως την κατάσταση η οποία έχει συγκεκριμένο προσανατολισμό και στόχο (Χρονάκη, 2007). Αυτό που κάνει το «διδακτικό πείραμα» να υπερτερεί έναντι άλλων μεθοδολογιών είναι ότι η εστίαση αλλάζει και δίνεται έμφαση στην αναγνώριση του ρόλου των υποκειμένων ως ενεργοί κατασκευαστές νοήματος (Χρονάκη, 2007). Οι διδακτικές ενέργειες που συμβαίνουν στο πλαίσιο του «διδακτικού πειράματος», γίνονται σε αλληλεπίδραση με τους μαθητές. Ωστόσο, αυτή η αλληλεπίδραση δεν λαμβάνεται ως μια δεδομένη διαδικασία. Γι’αυτό το λόγο το πως γίνεται η αλληλεπίδραση με τους μαθητές είναι ένα κεντρικό ζήτημα στο κάθε διδακτικό πείραμα (Steffe & Thompson, 2000). Οι ερευνητές μπορεί στην αρχή ενός διδακτικού πειράματος να κάνουν κάποιες υποθέσεις για την έρευνα τους, όμως ακόμα και οι ερευνητές που έχουν εμπειρία στη διδασκαλία μπορεί να μην γνωρίζουν αρκετά καλά τι πρόοδο θα κάνουν οι μαθητές και γι’αυτό το λόγο μπορεί να βγάλουν και λάθος συμπεράσματα αρχικά. Αν οι ερευνητές γνώριζαν εκ των προτέρων πως θα αλληλεπιδράσουν οι μαθητές τους κατά τη διάρκεια του διδακτικού πειράματος και ποια θα είναι τα αποτελέσματα αυτής της αλληλεπίδρασης, δεν θα υπήρχε λόγος για τη διενέργεια ενός «διδακτικού πειράματος» (Steffe & Thompson, 2000).
Στόχος της παρούσας έρευνας είναι η διερεύνηση των διαφορών στις επιδόσεις των νηπίων σε σχέση με την διδασκαλία της έννοιας της διαδρομής εξετάζοντάς το τόσο στο γνωστικό όσο και στο λεκτικό κομμάτι με τη χρήση διαφορετικών ψηφιακών περιβαλλόντων (Bee-bot, Google Earth & Ladybug Maze).
Τα ερευνητικά μας ερωτήματα είναι τα εξής:
1.Γνωρίζουν τα παιδιά τις έννοιες πάνω, κάτω, δεξιά, αριστερά, μπρος και πίσω και πώς τις εκφράζουν (προφορικά ή συμβολικά);
2.Με ποιούς τρόπους αναπαριστούν τις έννοιες αυτές (χρήση προφορικού λόγου ή γλώσσας σώματος);
3.Πώς τα ψηφιακά μέσα υποστηρίζουν την αφαιρετική σκέψη;
4.Τι διαφορές μπορούμε να παρατηρήσουμε ανάμεσα σε διαφορετικά ψηφιακά μέσα;
Μέθοδος
Συμμετέχοντες
Το δείγμα της έρευνάς μας αποτέλεσαν 12 νήπια, 4 αγόρια και 8 κορίτσια με μέσο όρο ηλικίας τα 5 χρόνια. Τα παιδιά δούλεψαν σε τρείς διαφορετικές φάσεις: α) ομάδες των δύο ατόμων, β) ολομέλεια και γ) ομάδες των τεσσάρων ατόμων. Οι ομάδες επιλέχθηκαν ύστερα από συνεννόηση με τη Νηπιαγωγό της τάξης, προκειμένου να προκύψουν ομοιόμορφες ομάδες παιδιών.
Μέσα συλλογής δεδομένων
Στην παρούσα εργασία χρησιμοποιήθηκαν διάφορα μέσα συλλογής δεδομένων. Αρχικά, δόθηκε στην Νηπιαγωγό ένα ερωτηματολόγιο για να συζητήσουμε τα εξής: α) τις γνώσεις της Νηπιαγωγού γύρω από τις Νέες Τεχνολογιές, β) αν χρησιμοποιεί ψηφιακά μέσα στη διδασκαλία της, γ) απόψεις της Νηπιαγωγού για τις γνώσεις των παιδιών γύρω από την έννοια του προσανατολισμού και τις στάσεις των παιδιών για τις Νέες Τεχνολογίες όταν χρησιμοποιούνται από την Νηπιαγωγό για την διδασκαλία εννοιών. Στη συνέχεια, τα παιδιά επεξεργάστηκαν τρία φύλλα εργασίας (βλ. παράρτημα). Το πρώτο φύλλο εργασίας απαρτιζόταν από ζεύγη εικόνων. Τα ζεύγη εικόνων ήταν τοποθετημένα με δύο τρόπους: α) πάνω-κάτω και β) δεξιά-αριστερά. Σε κάθε περίπτωση ζητούσαμε από τα παιδιά να μας καθορίσουν που βρίσκεται η εικόνα που τους υποδεικνύαμε. Τα άλλα δύο φύλλα εργασίας αποτελούνταν από ένα λαβύρινθο το καθένα. Το κάθε παιδί έπρεπε να μας εξηγήσει πια διαδρομή έπρεπε να ακολουθήσει για να φτάσει στο στόχο του (τερματισμό). Σ’αυτή τη διαδικασία παροτρύναμε τα παιδιά να μας περιγράψουν την διαδρομή. Σκοπός των τριών φύλλων εργασίας ήταν να ανιχνεύσουμε τις προϋπάρχουσες γνώσεις των παιδιών για την έννοια της διαδρομής.
Στη δεύτερη φάση της εργασίας μας, χρησιμοποιήθηκε η προγραμματισμένη συσκευή bee-bot. Το bee-bot είναι ένα ρομποτάκι σε μορφή μέλισσας και ο χρήστης μπορεί να την προγραμματίσει να κάνει μια διαδρομή που επιθυμεί. Έχει τέσσερα κουμπιά- βέλη (μπρος, πίσω, στροφή δεξιά και στροφή αριστερά και άλλα τρία κουμπιά: α) clear, β) go και γ) pause. Το bee-bot έχει συγκεκριμένο βήμα (15 εκ.) και για αυτό το λόγο προσπαθήσαμε να το οπτικοποιήσουμε για να είναι σε θέση τα νήπια να κατανοήσουν πόσα βήματα πρέπει να κάνει το ρομποτάκι για να φτάσει στο τέλος της διαδρομής του, για το λόγο αυτό σχεδιάσαμε καρτέλες με τα βελάκια που συναντούμε στο bee-bot. Έτσι, όταν τα παιδιά πειραματίστηκαν με το ρομποτάκι και σχηματίζαν διαδρομές με τις καρτέλες ήταν σε θέση να υπολογίσουν πόσα βήματα χρειάζεται για να φτάσει στον τερματισμό το bee-bot. Το ίδιο έγινε και στην μακέτα, όπου είχαμε σχεδιάσει μια διαδρομή και το bee-bot έπρεπε να βρει το δρόμο για το σπίτι του. Η διαδρομή είχε χωριστεί σε τετράγωνα, τα οποία ήταν ίσα σε μέγεθος με το βήμα του bee-bot. Με αυτή την “βοήθεια” τα παιδιά μπορούσαν πιο εύκολα να κάνουν υπολογισμούς για να φέρουν εις πέρας την διαδρομή. Στο παιχνίδι με τη μακέτα-διαδρομή τα παιδιά επιλέχτηκαν από τη Νηπιαγωγό και χωρίστηκαν σε τρείς ομάδες των τεσσάρων ατόμων.
Τέλος, στη τρίτη φάση της έρευνας χρησιμοποιήθηκαν δύο διαφορετικά περιβάλλοντα: α) χάρτης του Google Earth και β) το Ladybug Maze, τα οποία διατίθενται ελεύθερα στο διαδίκτυο και είναι εύκολη η πρόσβασή τους. Τα παιδιά και στις δύο δραστηριότητες εργαστήκανε σε ομάδες των δύο ατόμων. Μέσα από αυτή τη διαδικασία θέλαμε να διαπιστώσουμε πως αντιμετωπίζουν τα παιδιά την έννοια του προσανατολισμού σε διαφορετικά ψηφιακά πλαίσια. Στο πρώτο ψηφιακό πλαίσιο (Google Earth) τα παιδιά είχαν ένα σημείο εκκίνησης (το οποίο είχε οριστεί από τις ερευνήτριες) και έπρεπε να μας εξηγήσουν πως θα φτάσουν στο σημείο τερματισμού (το οποίο είχε οριστεί και αυτό από τις ερευνήτριες). Αντίστοιχα, στο δεύτερο ψηφιακό πλαίσιο (Ladybug Maze) τα παιδιά έπρεπε να προγραμματίσουν την πασχαλίτσα να φτάσει στο στόχο της επιλέγοντας την σωστή διαδρομή στο δομημένο περιβάλλον (λαβύρινθος).
Κατά τη διαρκεια και των τριών φάσεων μέσα από διάφορες ερωτήσεις προσπαθούσαμε να αντλήσουμε πληροφορίες από τα νήπια για να μπορέσουμε να διαπιστώσουμε κατά πόσο κατανοούν τις έννοιες του προσανατολισμού.
Διαδικασία
Έγιναν τρεις συναντήσεις με τα νήπια, στις οποίες πραγματοποιήθηκαν τέσσερις δράσεις. Η πρώτη συνάντηση έγινε σε διαφορά τεσσάρων ημερών με τις άλλες δύο συναντήσεις. Όλες οι συναντήσεις εκτός της πρώτης βιντεοσκοπήθηκαν. Στην πρώτη συνάντηση έγινε συλλογή μόνο φωτογραφικού υλικού ενώ στις άλλες δύο υπήρξε συνδιασμός φωτογραφιών και βίντεο.
Συνάντηση 1η
1η Δράση: Αναπαράσταση των εννοιών δεξιά, αριστερά, πάνω, κάτω, μπρος και πίσω με το σώμα.
Στη συγκεκριμένη δράση δουλέψαμε με την ολομέλεια της τάξης. Πιο συγκεκριμένα, ρωτήσαμε τα παιδιά για τις έννοιες πάνω, κάτω, δεξιά, αριστερά, μπρος και πίσω. Στη συνέχεια, παροτρύναμε τα νήπια να μας αναπαραστήσουν με το σώμα τους τις παραπάνω έννοιες, δηλαδή τα νήπια με τη βοήθεια των χεριών τους έδειχναν το «πάνω- κάτω» χωρίς δυσκολία, ενώ οι έννοιες «αριστερά- δεξιά» τους δυσκόλεψαν. Τα αφήσαμε να ενεργήσουν μόνα τους αρχικά και στη πορεία τους δίναμε κάποιες οδηγίες για να αναπαραστήσουν με το σώμα τους μια μικρή διαδρομή. Για παράδειγμα, έχοντας θέσει ένα σημείο έναρξης στο χώρο της αίθουσας (μια κούκλα) και ένα σημείο προορισμού (κουζινικά σκεύη από τη γωνιά του μανάβικου γεμάτα με φρούτα). Μέσα στη διαδρομή είχε τοποθετηθεί ένα τραπέζι που έπαιζε το ρόλο του εμποδίου και τα παιδιά έπρεπε να στρίψουν προκειμένου αν φτάσουν στο σημείο τερματισμού. Στην πλειοψηφία τους τα παιδιά ανταποκρίθηκαν με επιτυχία στο συγκεκριμένο πλαίσιο της διαδρομής, ενώ κάποια δυσκολεύτηκαν στην έκφραση των εννοιών «αριστερά- δεξιά». Η επιτυχία της συγκεκριμένης δράσης μπορεί να οφείλεται στο γεγονός ότι το περιβάλλον αυτό ήταν τρισδιάστατο και αρκετά ελεύθερο, επιτρέποντας στα παιδιά να έχουν εναλλακτικές λύσεις και όχι μια «σωστή» λύση της διαδρομής.
2η Δράση: Φύλλα Εργασίας για εξερεύνηση των γνώσεων των παιδιών σε σχέση με την έννοια της διαδρομής και του προσανατολισμού.
Αυτή η δράση αποτέλεσε μια συνέχεια της προηγούμενης, καθώς στόχο είχε την εξερεύνηση των παραπάνω εννοιών σε ένα διαφορετικό πλαίσιο, πιο δομημένο, καθώς οι λύσεις και στα τρία φύλλα εργασίας ήταν συγκεκριμένες. Τα παιδιά εργάστηκαν σε ομάδες των δύο ατόμων, οι οποίες επιλέχθηκαν μετά από συνεννόηση με τη Νηπιαγωγό. Η κάθε ομάδα έκανε 3 φύλλα εργασίας, όπου στο πρώτο φύλλο με τις εικόνες τα παιδιά εργαζόταν ομαδικά και εξέφραζαν τις απόψεις τους για το ποια είναι η σωστή λύση. Δηλαδή, είχαν τοποθετηθεί στο χαρτί διάφορα ζεύγη εικόνων με διαφορετική διάταξη στο χώρο (πάνω- κάτω- δεξιά- αριστερά) και ζητήθηκε από τα παιδιά να απαντήσουν στις ερωτήσεις μας. Για παράδειγμα: «Μπορείς να μας πεις ποιο αντικείμενο βρίσκεται δεξιά;», «Ο σκύλος ή η τσάντα;». Στην συνέχεια, το παιδί έδινε προφορικά τη σωστή απάντηση και έπειτα τη σημείωνε πάνω στο χαρτί με ένα μαρκαδόρο. Παρατηρήθηκε πως κάποια παιδιά δυσκολεύονταν να ξεχωρίσουν τις έννοιες «δεξιά- αριστερά» και με γνώμονα το σώμα και τα χέρια τους, προσπαθούσαν να αναγνωρίσουν αυτές τις έννοιες. Στα φύλλα εργασίας που απεικόνιζαν μια δομημένη διαδρομή σε λαβύρινθο, τα παιδιά ανέλαβαν από μια διαδρομή το καθένα. Συμπερασματικά, παρατηρήθηκε πως τα παιδιά είναι πιο εξοικειωμένα με τις έννοιες «πάνω- κάτω», «μπροστά- πίσω» και συναντούσαν μεγαλύτερες δυσκολίες στην κατανόηση των εννοιών «δεξιά- αριστερά». Επίσης, σημαντική βοήθεια για αυτά αποτέλεσε η βιωματική αναπαράσταση των εννοιών με το σώμα τους.
Συνάντηση 2η
3η Δράση: Γνωριμία, Πειραματισμός και Εξοικείωση με το Bee-Bot.
Η γνωριμία και η εξοικείωση με το Bee-bot έγινε με την ολομέλεια της τάξης. Με αφορμή μια μικρή ιστοριούλα τους παρουσιάσαμε το Bee-bot και αφήσαμε να το επεξεργαστούν για να μας εκφράσουν τι μπορεί να κάνει το ρομποτάκι. Στη συνέχεια, με τη βοήθεια καρτελών όπου αναπαριστούσαν με βέλη το μπρος, πίσω, δεξιά και αριστερά καθώς και το go, clear και pause (λειτουργίες που έχει το bee-bot) τα παιδιά δημιουργούσαν τις δικές τους διαδρομές και προγραμμάτιζαν το bee-bot για να τις εκτελέσει. Αυτή η διαδικασία διήρκησε αρκετή ώρα εξαιτίας του ενθουσιασμού που έδειξαν τα νήπια. Συμπερασματικά, παρατηρήθηκε πως τα παιδιά δυσκολεύτηκαν στο πώς να κάνουν το ρομποτάκι να στρίψει. Δηλαδή, δεν κατανοούσαν ότι το πάτημα της εντολής για να στρίψει, πίστευαν πως το πάτημα της δεξιά- αριστερής κατεύθυνσης ήτα στροφή με βήμα, ενώ στην πραγματικότητα ήταν μόνο στροφή προς την δεξιά ή αριστερή κατεύθυνση.
Εικόνα 1. Εξοικείωση με το Bee-Bot.

4η Δράση: Εφαρμογή του bee-bot σε μακέτα.
Μετά την ολοκλήρωση της γνωριμίας με το bee-bot χωρίσαμε τα νήπια σε 3 ομάδες των 4 ατόμων και δουλέψαμε σε ξεχωριστή αίθουσα με την κάθε ομάδα. Σε αυτή την δράση δόθηκε στα παιδιά μια μακέτα, η οποία απεικόνιζε μια διαδρομή που έπρεπε να κάνει το ρομποτάκι για να πάει στο σπίτι του. Η διαδρομή της μακέτας για την ευκολία της μέτρησης των βημάτων από τα παιδιά είχε χωριστεί σε ίσα τετράγωνα (όσο ήταν το βήμα του bee-bot). Τα παιδιά στην αρχή μας έλεγαν τις απόψεις τους για το πόσα βήματα πρέπει να κάνει για να πάει σπίτι του. Στη πορεία με τη παρέμβασή μας (σαν βοηθοί) καταφέραμε μαζί με τα παιδιά να οδηγήσουμε το μελισσάκι σπίτι του. Καθ’ όλη τη διάρκεια τα παιδιά συνεργάζονταν μεταξύ τους βοηθώντας το ένα το άλλο.
Εικόνα 2. Bee-bot & καρτέλες με go & clear.
Συνάντηση 3η
5η Δράση: Προσανατολισμός στο ψηφιακό πλαίσιο Google Earth.
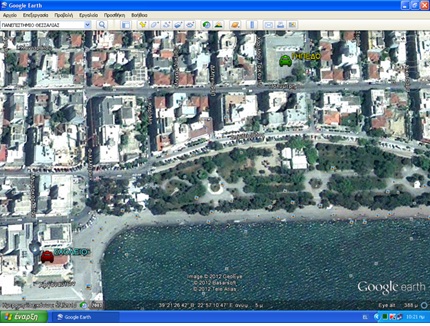
Το Google Earth χρησιμοποιήθηκε σαν ένα διαφορετικό ψηφιακό μέσο για να διαπιστωθεί πως τα παιδιά αντιλαμβάνονται την έννοια της διαδρομής και του προσανατολισμού σε ένα άλλο πλαίσιο. Στο περιβάλλον του Google Earth τα παιδιά εργάστηκαν σε ομάδες των δύο ατόμων στη γωνιά του υπολογιστή. Σαν εικόνα στο Google Earth βάλαμε μια περιοχή του Βόλου στην οποία είχαμε ορίσει ένα σημείο εκκίνησης (κόκκινο αυτοκίνητο) και ένα σημείο τερματισμού (πράσινο αυτοκίνητο). Αφήσαμε τα παιδιά να μας πουν πρώτα ελεύθερα τι νομίζουν ότι είναι αυτό που βλέπουν στην οθόνη και στη συνέχεια, τους παροτρύναμε να μας εξηγήσουν ποια διαδρομή πρέπει να πάρει το κόκκινο αυτοκίνητο για να πάει στο πράσινο. Σε όποια σημεία δυσκολεύτηκαν τα παιδιά, τα βοηθούσαμε με διάφορες ερωτήσεις να προχωρήσουν. Τέλος, τα παιδιά πρώτα μας έδειχναν με το δάχτυλο τη διαδρομή που έπρεπε να ακολουθήσουν και στη συνέχεια επαναλάμβανε την ίδια διαδρομή με τον δείκτη του ποντικιού. Το ποντίκι το κρατούσε πρώτα το ένα παιδί και μετακινώντας το δείκτη μας έδειχνε την διαδρομή και στη συνέχεια ακολουθούσε και το άλλο.
Εικόνα 3. Περιβάλλον Google Earth.
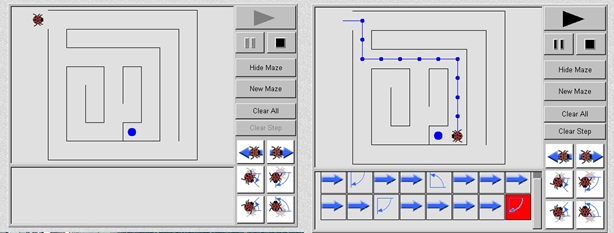
6η Δράση: Προσανατολισμός σε περιβάλλον Logo Ladybug maze.
Το συγκεκριμένο ψηφιακό μέσο αποτελεί ένα δομημένο περιβάλλον στο οποίο το παιδί πρέπει να ακολουθήσει μια συγκεκριμένη διαδρομή για να οδηγήσει την πασχαλίτσα στον προορισμό της. Και σε αυτή τη δράση τα παιδιά εργάστηκαν σε ομάδες των δύο ατόμων στη γωνιά του υπολογιστή. Στην αρχή υπήρξε μια γνωριμία με το Ladybug maze για να μπορέσουν τα παιδιά να κατανοήσουν την εφαρμογή του. Έτσι, η κάθε λειτουργία των εργαλείων στο συγκεκριμένο περιβάλλον (δηλαδή, βελάκια, play, clear) εξηγήθηκε στα παιδιά για να μπορέσουν να τα χρησιμοποιήσουν. Στη συνέχεια, αφού υπήρξε μια εξοικείωση με το λογισμικό (πραγματοποιήθηκε πειραματισμός με τα κουμπιά ελεύθερα από τα παιδιά), τα παιδιά προσπάθησαν να κάνουν την πασχαλίτσα να φτάσει στο στόχο της. Εργάστηκαν ομαδικά και το ένα βοηθούσε το άλλο όποτε συναντούσαν κάποια δυσκολία. Δηλαδή, όταν ένα από τα δύο παιδιά δυσκολευόταν στον προγραμματισμό της πασχαλίτσας δεχόταν την βοήθεια από το άλλο νήπιο και του εξηγούσε τι πρέπει να κάνει. Συμπερασματικά στην 3η συνάντηση τα παιδιά δυσκολεύτηκαν στις έννοιες «δεξιά – αριστερά» και στο ότι και τα δύο ψηφιακά περιβάλλοντα ήταν δυσδιάστατα και όχι τρισδιάστατα.
Εικόνα 4. Περιβάλλον Logo- Ladybug Maze
Αποτελέσματα
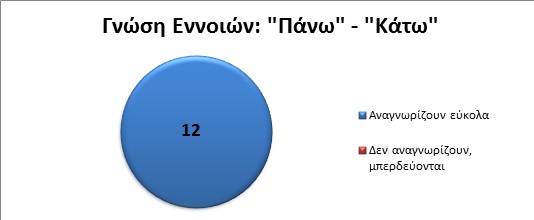
Από τα αποτελέσματα της έρευνάς μας φαίνεται ότι τα ψηφιακά περιβάλλοντα, τόσο της Logo, όσο και της Google Earth, καθώς και η προγραμματιζόμενη συσκευή του Bee- Bot, αποτέλεσαν για τα παιδιά μια αφορμή για ενεργή εμπλοκή σε προβλήματα που έχουν νόημα γι’ αυτά. Τα παιδιά καθ’ όλη τη διάρκεια των δράσεων, έδειξαν αμείωτο ενδιαφέρον και θέληση για συμμετοχή στις δράσεις και για πειραματισμό με τα νέα εργαλεία. Δηλαδή, τα παιδιά έδειξαν από την αρχή ενδιαφέρον για τα ψηφιακά μέσα ρωτώντας συνεχώς πότε θα «παίξουν» με αυτά. Ακόμη και αν κάποιες δράσεις τα δυσκόλεψαν (όπως το περιβάλλον Google Earth), με ενθάρρυνση συνέχισαν το έργο τους. Στην πρώτη φάση που στοχεύαμε στην ανίχνευση των προϋπαρχουσών γνώσεων των παιδιών, φάνηκε πώς τα περισσότερα από αυτά γνώριζαν και ξεχώριζαν τις έννοιες προσανατολισμού στον χώρο. Οπότε στην πορεία στοχεύσαμε στο πως τα παιδιά αντιμετωπίζουν τις έννοιες αυτές σε διαφορετικά πλαίσια. Η ανίχνευση αυτή έγινε με τη χρήση του 1ου Φύλλου Εργασίας που χορηγήθηκε στα παιδιά. Πιο συγκεκριμένα, παρακάτω ακολουθεί ένα διάγραμμα που μαρτυρά αυτή την ανίχνευση των γνώσεων των παιδιών.
Διάγραμμα 1
Όλο το σύνολο των παιδιών της τάξης ξεχώριζε τις έννοιες «πάνω» και «κάτω» χωρίς καμία δυσκολία στα Φύλλα Εργασίας.
Διάγραμμα 2
Τα περισσότερα παιδιά της τάξης (στο σύνολό τους 7) αναγνώριζαν αμέσως τις έννοιες αυτές. Τέσσερα παιδιά μπέρδευαν τις έννοιες, ενώ ένα μόνο παιδί δεν ήξερε καθόλου τις έννοιες.
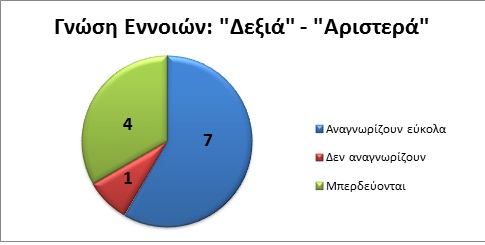
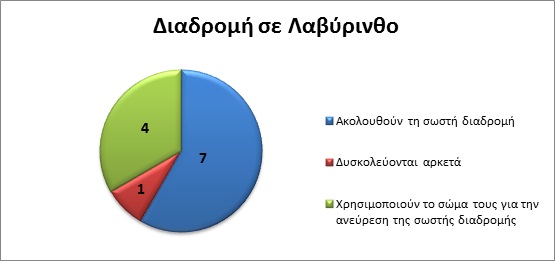
Έτσι λοιπόν όπως φαίνεται και από τα διαγράμματα, στην πλειοψηφία τους τα παιδιά γνώριζαν τις έννοιες προσανατολισμού που θέλαμε να διδάξουμε. Κάτι που μας έκανε μεγάλη εντύπωση, ήταν η φράση ενός κοριτσιού που δεν ήξερε τις έννοιες «αριστερά» και «δεξιά», το οποίο χαρακτηριστικά είπε: «Δεν μου τα έμαθε η μαμά μου», για να δικαιολογηθεί που δεν τα γνώριζε. Ακόμη, ένα άλλο κορίτσι προκειμένου να θυμηθεί τις κατευθύνσεις του «δεξιά» και «αριστερά», χρησιμοποιούσε τα χέρια της. Δηλαδή κάθε φορά που δεν θυμόταν καλά, σήκωνε ψηλά τα χέρια της και τα άνοιγε και με αυτό τον τρόπο βοηθιόταν για να βρει τη σωστή κατεύθυνση. Όσον αφορά την επίδοση των παιδιών στο 2ο Φύλλο Εργασίας, παρατηρήθηκε ότι τα παιδιά με ευκολία βρήκαν τη σωστή διαδρομή δίνοντας οδηγίες μέχρι να φτάσουν στο σημείο εξόδου. Σε αυτή λοιπόν τη δράση ακολουθούν τα παρακάτω διαγράμματα:
Διάγραμμα 3
Τα περισσότερα παιδιά ακολούθησαν τη σωστή διαδρομή που πρέπει να εκτελέσει ο ήρωας της εικόνας για να βγει από τον λαβύρινθο. Παρατηρήθηκε επίσης το φαινόμενο, αρκετά παιδιά να ψάχνουν να βρουν τη σωστή διαδρομή δείχνοντας με το δάχτυλό τους. Πιο συγκεκριμένα, πρώτα έδειχναν με το χέρι τους τη διαδρομή που πρέπει να ακολουθήσουν και μετά με τη βοήθεια του μαρκαδόρου σημείωναν τη διαδρομή πάνω στο χαρτί.
Διάγραμμα 4
Ένα μόνο παιδί χρησιμοποίησε τους κατάλληλους όρους για να προσανατολιστεί στο χώρο. Τα υπόλοιπα παιδιά, είτε χρησιμοποιούσαν δικές τους φράσεις για να δώσουν οδηγίες, είτε χρησιμοποιούσαν όρους όπως «πάνω- κάτω» ή «πάει έτσι, έτσι, έτσι…».
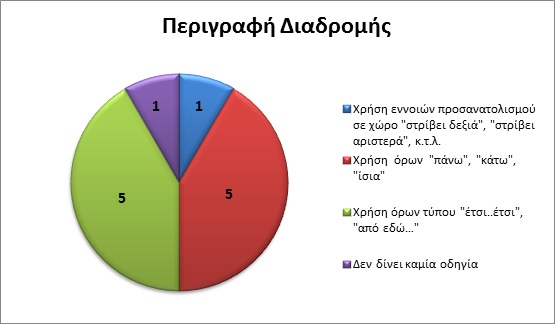
Όπως φαίνεται και από τα παραπάνω διαγράμματα, τα παιδιά αν και αναγνώριζαν τις έννοιες προσανατολισμού στον χώρο, δυσκολεύονταν πολύ στο να δώσουν οδηγίες και να χρησιμοποιήσουν τους σωστούς όρους. Επίσης, στην πρώτη φάση πραγματοποιήθηκε και η βιωματική δράση, στην οποία τα παιδιά αναπαρέστησαν με το σώμα τους τις κατευθύνσεις των εννοιών. Σε αυτή τη δράση, όλα τα παιδιά γνώριζαν προς τα πού πρέπει να κινηθούν ακολουθώντας τις δικές μας οδηγίες στο χώρο. Με τη βοήθεια αυτής της δράσης τα παιδιά συμμετείχαν ενεργητικά στη μάθηση των εννοιών, κάτι που λειτούργησε ως «επανάληψη» για τα παιδιά που δεν ήταν ακόμη σίγουρα για αυτές τις έννοιες.
Αναφορικά με τη δεύτερη φάση των δράσεων παρατηρήθηκαν αρκετά σημεία, που θα θέλαμε να παρουσιάσουμε. Καταρχάς, αν και το Bee- Bot αποτελεί ένα πολύ χρήσιμο και ενδιαφέρον εργαλείο για την εκπαιδευτική διαδικασία, κρίθηκε σημαντική η δυσκολία εφαρμογής του στην ολομέλεια της τάξης. Όταν παρουσιάσαμε το ρομποτάκι σε όλα τα παιδιά, εκείνα ήθελαν να το δουν από κοντά και να το αγγίξουν, κάτι που προκάλεσε μια χαοτική κατάσταση μέσα στην τάξη. Για το λόγο αυτό, καταλήξαμε στο ότι η εργασία σε μικρές ομάδες αποδίδει καλύτερα συγκριτικά με την ολομέλεια της τάξης. Επίσης, αν και το Bee- Bot μοιάζει με μια εύκολη συσκευή στη χρήση της για τους ενήλικες, στην πορεία παρατηρήσαμε πώς αυτή η συσκευή δεν μπορεί να χρησιμοποιηθεί μόνο από τα παιδιά χωρίς την κατάλληλη βοήθεια και διαμεσολάβηση της νηπιαγωγού. Πιο συγκεκριμένα, η εκπαιδευτικός θα πρέπει να εξηγήσει στα παιδιά τα σύμβολα που υπάρχουν πάνω στην μέλισσα, καθώς εκείνα είναι στα αγγλικά και να τα αφήσει να πειραματιστούν μαζί του για να κατανοήσουν τη λειτουργία του. Άλλο ένα σημείο που παρατηρήθηκε κατά τη πορεία των δραστηριοτήτων με το Bee- Bot, ήταν η δυσκολία αυτορρύθμισης από το μέρος των παιδιών. Δηλαδή, αυτή η συσκευή δεν διαθέτει κάποιο μηχανισμό που να δείχνει στο παιδί αν πάτησε κάποιο λανθασμένο κουμπί, καθώς δεν έχουν τη δυνατότητα να ελέγξουν την πορεία βηματισμών του ρομπότ. Κάθε φορά που τα παιδιά έκαναν λάθος και το συνειδητοποιούσαν, έπρεπε να σβήσουν όλο το πρόγραμμα που έδωσαν με εντολές και να το ξεκινήσουν από την αρχή, πράγμα που τα κούραζε και πολλές φορές τα νευρίαζε.
Τέλος, φοβερή εντύπωση μας έκανε το γεγονός ότι διαπιστώσαμε έμφυλες διαφορές στον τρόπο χρήσης του Bee- Bot. Πιο συγκεκριμένα, τα αγόρια εμφανίζονταν να έχουν περισσότερο ενεργητικό και κεντρικό ρόλο στη χρήση της συσκευής, σε αντίθεση με τα κορίτσια. Ο ρόλος των κοριτσιών ήταν περισσότερο βοηθητικός σχετικά με τη συσκευή, καθώς επιθυμούσαν να πατούν τα κουμπιά της συσκευής. Επίσης, φάνηκε να μην τα ενδιαφέρει τόσο να σκεφτούν και να βρουν τη σωστή διαδρομή. Ακόμη και όταν ερχόταν η σειρά τους, δεν ήθελαν να σκεφτούν για το «πρόβλημα» της διαδρομής και ζητούσαν τη βοήθεια των αγοριών για τις σωστές κατευθύνσεις. Σε γενικές γραμμές όλα τα παιδιά συνεργάστηκαν μαζί μας στη δράση με το Bee- Bot και εργάστηκαν δείχνοντας ενδιαφέρον. Ενώ αρχικά στο σχεδιασμό των δράσεων περιμέναμε από τα παιδιά να προγραμματίσουν τη συσκευή πατώντας πολλά κουμπιά στη σειρά και να βρουν τη σωστή διαδρομή, αυτό στην πράξη δεν μπόρεσε να γίνει. Τα παιδιά δυσκολεύονταν πάρα πολύ στο να σκεφτούν πολλές ενέργειες μαζί και να ελέγξουν όλες τις παραμέτρους που εμπλέκονταν σε αυτή τη δράση. Για το λόγο αυτό, «κόψαμε» τη μακέτα σε πιο μικρές διαδρομές. Έτσι τα παιδιά μπορούσαν με πιο άνεση να ελέγξουν τη συσκευή, διορθώνοντας πιο εύκολα τα λάθη τους. Ενώ, στην περίπτωση που η διαδρομή ήταν μεγάλη και προέκυπτε κάποιο λάθος από μέρος των παιδιών, οι εντολές έπρεπε να σβηστούν και να ξεκινήσει ο προγραμματισμός της συσκευής από την αρχή.
Όσον αφορά την τρίτη φάση των δράσεων, στο ψηφιακό περιβάλλον της Google Earth, τα παιδιά δυσκολεύτηκαν πολύ με την ανεύρεση της σωστής διαδρομής. Δεν μπορούσαν να προσανατολιστούν με ευκολία στο χώρο χωρίς να αναγνωρίζουν ποιοι δρόμοι είναι ελεύθεροι (χωρίς εμπόδια). Ακόμη, δεν ήταν σε θέση να κατανοήσουν τις έννοιες «αριστερά» και «δεξιά», καθώς το περιβάλλον δεν ήταν τρισδιάστατο. Άλλο ένα στοιχείο που παρατηρήθηκε και σε αυτή τη δραστηριότητα ήταν το γεγονός ότι τα παιδιά χρησιμοποιούσαν το δάχτυλό τους προκειμένου να δείξουν τις διαδρομές. Χρησιμοποιώντας λοιπόν δικές τους άτυπες στρατηγικές για απεικόνιση της διαδρομής, χρησιμοποίησαν κινήσεις με τα χέρια τους δείχνοντας με το δάχτυλό τους τη διαδρομή που θεωρούσαν ως σωστή. Το δάχτυλό τους ήταν σαν να «εξηγεί» την διαδομή που θα ακολουθήσει για να φτάσει στο επιθυμητό σημείο στον χάρτη, χωρίς να χρειαστεί το παιδί να «διαβάσει» τη διαδρομή και να την εκφράσει λεκτικά.
Τέλος, στο περιβάλλον της Logo παρατηρήθηκε πως στην πλειοψηφία τους τα παιδιά δεν δυσκολεύτηκαν με την πλοήγησή τους στον χώρο. Η μοναδική δυσκολία που εμφανίστηκε ήταν τα εικονίδια που απεικόνιζαν τις γωνίες για στροφή της πασχαλίτσας. Τα παιδιά αρχικά δεν ήταν σε θέση να καταλάβουν πόσο στρίβει το κάθε κουμπί, αλλά στη συνέχεια, ύστερα από αρκετή εξάσκηση και πειραματισμούς, συνειδητοποίησαν τις διαφορές στις κλίσεις των γωνιών. Τα παιδιά εκείνα που δυσκολεύονταν στο να καταλάβουν την αντιστοιχία κουμπιού σε περιβάλλον με την κίνηση της πασχαλίτσας, προσπάθησαν να χωρίζουν τη διαδρομή σε μικρότερα κομμάτια. Παρατηρήθηκε πως κάποια παιδιά πατούσαν σταδιακά τα κουμπιά θέλοντας επιβεβαίωση των επιλογών τους, ενώ άλλα πατούσαν περισσότερα κουμπιά μετρώντας πολλές φορές τα πιθανά βήματα της πασχαλίτσας. Έτσι λοιπόν, εκτός από το θέμα του προσανατολισμού, προέκυψε και το θέμα της μέτρησης. Με κατάλληλες ερωτήσεις παροτρύναμε τα παιδιά να σκεφτούν για παράδειγμα «πόσα βήματα πιστεύεις πως πρέπει να κάνει η πασχαλίτσα μέχρι να φτάσει στην μπλε βούλα;». Το περιβάλλον της Logo σε αντίθεση με το Bee-Bot, διαθέτει μηχανισμούς αυτορρύθμισης της μάθησης των παιδιών. Δηλαδή, τα παιδιά κάθε φορά που πατούσαν μια εντολή, αυτή εμφανιζόταν από κάτω σε ένα παραθυράκι. Οπότε στις περιπτώσεις όπου έδιναν λανθασμένες εντολές στην πασχαλίτσα και ήθελαν να τις αλλάξουν, δεν χρειαζόταν να σβήσουν ολόκληρη τη σειρά των εντολών, αλλά μόνο το κουμπάκι που ήταν απαραίτητο. Αυτό διευκόλυνε πολύ τα παιδιά στο να κατανοήσουν τα λάθη τους καθώς και να διορθώσουν.
Συζήτηση
Στην παρούσα εργασία μελετήθηκε η έννοια της διαδρομής μέσα από τέσσερα διαφορετικά πλαίσια (φύλλα εργασίας, Bee-Bot, Google Earth & Ladybug maze). Όλες οι συνεδρίες πραγματοποιήθηκαν κυρίως σε ομάδες των 2 ή 4 ατόμων. Η ολομέλεια χρησιμοποιήθηκε μόνο στη γνωριμία με το Bee-Bot κάτι το οποίο προκάλεσε μια αναταραχή γιατί όλα τα παιδιά ήθελαν να παίξουν με το ρομποτάκι. Οι μικρές ομάδες φαίνεται να είναι πιο λειτουργικές και προσφέρουν στα νήπια καλύτερη και πιο άμεση ανατροφοδότηση από τον εκπαιδευτικό. Κατά την διάρκεια των δράσεων τα παιδιά έδειξαν να κατανοούν σε μεγάλο βαθμό τις έννοιες της διαδρομής σε σχέση με άλλα συστήματα αναφοράς εκτός του εαυτού τους. Αυτό έρχεται σε συμφωνία με παλαιότερες έρευνες, οι οποίες υποστηρίζουν ότι τα νήπια είναι σε θέση να κάνουν νοερούς μετασχηματισμούς και να προβλέψουν ή να αναπαραστήσουν τις αλλαγές που προκύπτουν καθώς, όσο μεγαλώνουν τα παιδιά μπαίνουν στην διαδικασία προσανατολισμού με αλλοκεντρικά συστήματα (Τζεκάκη, 2011).Ακόμη, τα νήπια στις περισσότερες δράσεις αναγνώριζαν τις έννοιες πάνω, κάτω, μπρος και πίσω όμως διαπιστώθηκε ότι συναντούσαν κάποιες φορές δυσκολίες στο διαχωρισμό των εννοιών δεξιά και αριστερά. Η παραπάνω «αδυναμία» επιβεβαιώνεται από παλαιότερες έρευνες, οι οποίες έδειξαν την περιορισμένη ικανότητα των νηπίων να συντονίσουν με επιτυχία χωρικές πληροφορίες (Newcomb & Huttenlocher, 2000). Επίσης, υποστηρίζεται ότι οι έννοιες δεξιά και αριστερά αποτελούν πηγή σύγχυσης για τα μικρά παιδιά για αρκετά χρόνια (CFE, 2009). Παρατηρείται από την ανασκόπηση της βιβλιογραφίας ότι η σύγχυση σε αυτές τις έννοιες έγκειται τόσο σε αφαιρετικά όσο και σε ψηφιακά περιβάλλοντα.
Όσον αναφορά την εμπλοκή των ψηφιακών μέσων για την διδασκαλία μαθηματικών εννοιών σε παιδιά προσχολικής ηλικίας, επιβεβαιώνεται η έρευνα του Bers (2007), ο οποίος υποστηρίζει ότι τα παιδιά μπορούν να αποκτήσουν γνώσεις σχετικές με τον απλό προγραμματισμό καθώς και να μάθουν πώς να εφαρμόζουν τα μαθηματικά για την επίλυση προβλημάτων. Βέβαια, από την έρευνά μας φάνηκε ότι τα παιδιά χρειάζονται ένα μεγάλο χρονικό διάστημα για να επεξεργαστούν και να κατανοήσουν τα ψηφιακά μέσα. Πιο συγκεκριμένα, τα παιδιά χρειάστηκε αρκετή ώρα για να μπορέσουν να κατανοήσουν τις λειτουργίες των κουμπιών του bee-bot. Αντίθετα, το Ladybug maze υπερτερεί σ’αυτό το σημείο σε σχέση με το bee-bot, διότι το παιδί βλέπει στην οθόνη του υπολογιστή το κάθε βήμα που θα κάνει η πασχαλίτσα και μπορεί να κάνει αλλαγές χωρίς να σβήνει όλο τον προγραμματισμό. Διαπιστώθηκε ότι τα νήπια ανταποκρίθηκαν πιο θετικά στην δραστηριότητα με το bee-bot, καθώς κατάφεραν να προσανατολιστούν με μεγαλύτερη ευκολία παρά τις δυσκολίες που αντιμετώπισαν. Αντίθετα, τα παιδιά συνάντησαν μεγαλύτερη δυσκολία στο περιβάλλον του Google Earth και με τη παρέμβαση μας κατάφεραν να κατανοήσουν την διαδρομή που έπρεπε να ακολουθήσουν. Το γεγονός αυτό μπορεί να οφείλεται στην μη εξοικείωση των νηπίων με τέτοιου είδους περιβάλλοντα. Πιστεύουμε ότι μέσα από μια μεγαλύτερη εξοικείωση των παιδιών με το συγκεκριμένο περιβάλλον τα αποτελέσματα της εργασίας μας θα ήταν διαφορετικά. Σύμφωνα με τους Alimisis et.al. , (2007), το περιβάλλον της Logo δημιουργεί «νέους τρόπους σκέψης» βοηθώντας τα παιδιά να σκεφτούν για την επίλυση προβλημάτων έχοντας ως μεταβλητές με το χρόνο και το διάστημα σε σχέση με την πραγματική κίνηση. Παρ’όλα αυτά το bee-bot «κέρδισε» το ενδιαφέρον των παιδιών σε σχέση με τα άλλα δύο ψηφιακά μέσα με αποτέλεσμα να ανταποκριθούν καλύτερα και να διδαχθούν τις έννοιες που επιδιώκαμε. Η φιλοσοφία σχεδίασης αυτού του εκπαιδευτικού σεναρίου στηρίχθηκε στην άποψη ότι η μάθηση επέρχεται μέσα από το παιχνίδι (Ατματζίδου, Μαρκέλης & Δημητρίου, 2008). Το Bee-Bot, αν και αποτελεί διδακτικό εργαλείο μάθησης, θεωρήθηκε από τα παιδιά ως μια συσκευή παιχνίδι. Η πτυχή – παιχνίδι αποτελεί ένα σημαντικό παράγοντα θετικού κινήτρου και παρότρυνσης των παιδιών στην εκπαίδευση (Κόμης, 2005b). Η χρήση του διδακτικού αυτού εργαλείου βοήθησε πολύ τα παιδιά να κατανοήσουν έννοιες που σχετίζονται με τον προσανατολισμό, την μέτρηση καθώς και το θέμα των διαδρομών. Πιο συγκεκριμένα, τα βοήθησε να κατανοήσουν τη συνέπεια των εντολών που υπήρχαν πάνω στο μελισσάκι. Δηλαδή κάθε φορά που πατούσαν ένα κουμπί- εντολή, τα παιδιά παρατηρούσαν άμεσα την αντίδραση της συσκευής με ένα βάδισμα. Όπως επισημαίνεται από τους Beraza, Pina & Demo (2010), η χρήση της μικρής μέλισσας ανέπτυξε στα παιδιά δεξιότητες υπολογισμού, λογικής σκέψης και στρατηγικές επίλυσης τοπολογικών προβλημάτων (δηλαδή το «δικό μου δεξιά», «το δικό του δεξιά»). Και άλλες έρευνες που έχουν χρησιμοποιήσει αυτή τη συσκευή, κατέληξαν στο συμπέρασμα ότι η χρήση του Bee- Bot αποφέρει μόνο θετικά αποτελέσματα στο χώρο της προσχολικής εκπαίδευσης, καθώς θεωρείται ως ένα χρηστικό εργαλείο μάθησης για τα παιδιά (Demo, 2008). Οι μαθητές μέσα από τη βιωματική εμπλοκή μαθαίνουν έννοιες, αποκτούν στρατηγικές για να λύσουν προβλήματα που έχουν νόημα για αυτά (Bers & Portsmore, 2005) και οικοδομούν τα δικά τους γνωστικά μοντέλα εντοπίζοντας πιθανές σχέσεις μεταξύ της τεχνολογίας και των προσωπικών τους βιωμάτων (Webb & Cox, 2004).
Ολοκληρώνοντας θεωρούμε ότι η διάρκεια της μελέτης μας ήταν αρκετά περιορισμένη και δεν ήταν αρκετή για να εξαγάγουμε ασφαλή συμπεράσματα. Έτσι, προτείνεται μια μακροχρόνια μελέτη, με ποικιλία ψηφιακών μέσων για να διαπιστώσουμε με μεγαλύτερη ακρίβεια το τρόπο, με τον οποίο αναπτύσσουν τα μικρά παιδιά τις έννοιες προσανατολισμού ανάλογα με το ψηφιακό μέσο που εργάζονται. Κάνοντας μια συνολική αποτίμηση της εργασίας μας, θα μπορούσαμε να αλλάξουμε ως προς το σχεδιασμό της δράσης του Bee-Bot τις καρτέλες που απεικόνιζαν τη δεξιά και αριστερή στροφή καθώς η αναπαράστασή τους ήταν λανθασμένη.
Εικόνα. Αναπαράσταση εικονιδίων κατεύθυνσης (αριστερά, δεξιά, πάνω & κάτω)
Alimisis, D., Moro, M., Arlegui, J., Pina, A., Frangou, S. & Papanikolaou, K. (2007). EuroLogo Bratisiava, 1-11.
Ατματζίδου, Σ., Μαρκέλης, Η. & Δημητριάδης, Σ. (2008). Χρήση των LEGO Mindstorms στο Δημοτικό και Λύκειο: Το παιχνίδι ως έναυσμα μάθησης. Πρακτικά 4ου Πανελληνίου Συνεδρίου Διδακτικής της Πληροφορικής στην Πάτρα.
Battista, M. T. (2003). Understanding students’ thinking about area and volume measurement. In D. Clements & G. Bright (Eds.), Learning and teaching measurement (p. 122-142). Reston, VA: NCTM.
Benenson, G. (2001). The unrealized potential of everyday technology as a context for learning. Journal of Research in Science Teaching, 38, 730- 745.
Beraza, I., Pina, A. & Demo, B. (2010). Soft & Hard ideas to improve interaction with robots for Kids & Teachers. International Conference on Simulation, Modeling, and Programming for Autonomous Robots, 549-557.
Bers, M.U. (2007). Project InterActions: A Multigenerational Robotic Learning Enviromenment. Journal of Science Education and Technology, 16, 537-552.
Bers, M.U., Ponte, I., Juelich, K., Viera, A. & Schenker, J. (2002). Teachers as Designers: Intergrating Robotics in Early Childhood Education. Information Technology in Childhood Education, 123-145.
Bers, M.U. & Portsmore, M. (2005). Teaching Partnerships: Early Childhood and Engineering Students Teaching Math and Science Through Robotics. Journal of Science Education and Technology, 14 (1), 59-73.
Bers, M. & Urrea, C. (2000). Technological Prayers: Parents and Children Working with Robotics and Values. In Druin, A., and Hendler, J. (Eds.), Robots for Kids: Exploring New Technologies for Learning Experiences. Morgan Kaufman, NY.
Bowerman, M. (1996). Learning how to structure space for language: A cross-linguistic perspective. In P. Bloom, M. A. Peterson, L. Nadel, & M. F. Garrett (Eds.), Language and space (385-436). Cambridge, MA: MIT Press.
Bragg, P. & Outhred, L. (2004). A measure of rulers-the importance of units in a measure. 28th Conference of the International Group for the Psychology of Mathematics Education, 2, 159-166.
Center for Education (2009). Mathematics Learning in Early Childhood: Paths Toward Excellence and Equity.Διαθέσιμο (20/1/2012) στο: http://www.nap.edu/openbook.php?record_id=12519&page=182
Cejka, E., Rogers, C. & Portsmore, M. (2006). Kindergarten Robotics: Using Robotics to Motivate Math, Science, and Engineering Literacy in Elementary School. International Journal of Engineering Education, 22(4), 711–722.
Clements, D. (1999). Teaching Length Measurement: Research Challenges. School Science and Mathematics 99, 5-11.
Czarnocha, B.& Prabhu, V. (2006). Teaching Experiment/ NYC Model. Roczniki PTM Dydaktyka Matematyki. 29, 251-272.
Czarnocha, B. & Maj, B. (2007). A Teaching Experiment , Roczniki PTM Dydaktyka Matematyki. 47-57.
Demo, G.B. 2008. Programming Robots in Primary Schools Deserves a Renewed Attention. In Proceedings of the First WSKS (Athens, Greece, September 23-26, 2008). Springer, LNAI 5288, 322-331.
Gardner, H. (1983). Frames of Mind: The Theory of Multiple Intelligences. New York: Basic Books.
Καρατράντου, Α., Τάχος, Ν. & Αλιμήσης, Δ. (2005). Εισαγωγή σε Βασικές Αρχές και Δομές Προγραμματισμού με τις Ρομποτικές Κατασκευές Lego Mindstorms.Πρακτικά Εργασιών 3ου Πανελλήνιου Συνεδρίου «Διδακτική της Πληροφορικής», Πανεπιστήμιο Πελοποννήσου: Κόρινθος.
Κόμης, Β. Ι. (2005b). Παιδαγωγικές Δραστηριότητες με (και για) Υπολογιστές στην Προσχολική και την Πρώτη Σχολική Ηλικία. Πανεπιστημιακές Παραδόσεις, 2η Έκδοση, Πάτρα.
Κούριας, Σ. (2009). Βασικές Προδιαγραφές Εκπαιδευτικών Εφαρμογών με Ρομποτικές Κατασκευές.1ο Εκπαιδευτικό Συνέδριο «Ένταξη και Χρήση των ΤΠΕ στην Εκπαιδευτική Διαδικασία».
Newby, T., Stepich, D., Lehman, J. & Russell, J. (2006). Educational Technology for Teaching and Learning. Upper Saddle River, New Jersey, Chapter 2, 26-38.
Newcombe, N. S. and J. Huttenlocher (2000). Making Space. Cambridge MA: MIT Press.
Papert, S. (1980). Mindstorms: children, computers, and powerful. New York: Basic Books.
Pekárová, J. (2008). Using a Programmable Toy at Preschool Age: Why and How? International Conference on Simulation, Modeling, and Programming for Autonomous Robots, 112-121.
Piaget, J. (1978). Le jugement et le raisonement chez l’enfant. Paris: Delachaux et Nestle. Queensland Government (N.D.). (2011). Making Your Classroom Buzz With Bee- Bots: Ideas and Activities for the Early Phase. Available in:https://learning.secure.griffith.esu.au/webapps/portal/frameset.jsp?tab courses&url=/bin/common/course.pl?course_id=+93657_1&frame=top
Queensland College of Teachers. (2007). Proffesional Standards for Queensland Teachers (graduate level): A Guide for Use With Preservice Teachers. Available in: http://www.qct.edu.au/standards/documents/PSQT_GradLevel_v3 .
Rogers, C., Kearns, S.A., Rogers, Cathy, Barsosky, J., & Portsmore, M. (2001). Successful methods for introducing engineering into the first grade classroom. American Society of Engineering Education Annual Exposition and Conference Proceedings, New Mexico.
Steffe, L. P. & Thompson, P. W. (2000). Teaching experiment methodology: Underlying principles and essential elements. In R. Lesh & A. E. Kelly (Eds.), Research design in mathematics and science education (pp. 267- 307). Hillsdale, NJ: Erlbaum.
Strutchens, M., Martin,W.,G. & Kenney, P. A.(2003). “What Students Know about Measurement: Perspectives from the National Assessment of Educational Progress.” In Learning and Teaching Measurement: 2003 Yearbook, edited by D.Clements and G.Bright, pp. 195- 207, National Council of Teachers of Mathematics, Reston.
Resnick, M. (2003). Playful Learning and Creative Societies. Education Update, 8(6).
Τζεκάκη, Μ. (2011). Μαθηματική Εκπαίδευση για την Προσχολική και την Πρώτη Σχολική Ηλικία. Αθήνα: Ζυγός.
Webb, M. & Cox, M. (2004). A Review of Pedagogy Related to Information and Communications Technology. Technology, Pedagogy and Education, 13(3), 235-286.
Χρονάκη, Α. (2007). Το «διδακτικό πείραμα»: μελετώντας την ανάπτυξη μάθησης στο πλαίσιο της διδακτικής πράξης. Πανελλήνιο Διεπιστημονικό Συμπόσιο, Θεωρία και Ποιοτικές Μέθοδοι Έρευνας: Προοπτικές και Όρια.