Διαδρομές, κίνηση στο χώρο και μετρήσεις μήκους με προγραμματισμό της Beebot
Submitted by ltme on Mon, 12/02/2013 - 09:50
Οι κεντρικοί στόχοι της μαθηματικής εκπαίδευσης δεν είναι πια η τυπική μάθηση εννοιών και διαδικασιών αλλά η ανάπτυξη ενός τρόπου σκέψης που αξιοποιεί χαρακτηριστικά της μαθηματικής επιστήμης. Η εκπαίδευση αυτή αρχίζει από τις μικρότερες ηλικίες στη διάρκεια των οποίων, παράλληλα με την υπόλοιπη κοινωνικό και συναισθηματική ανάπτυξη, μπαίνουν τα θεμέλια και για την νοητική ανάπτυξη του ατόμου και κατά συνέπεια και την καλλιέργεια αυτού του ιδιαίτερου τρόπου σκέψης και δράσης. Στα πλαίσια της χωρικής αντίληψης από τα παιδιά θέσεων, διευθύνσεων και διαδρομών, οι μαθησιακοί στόχοι του Νέου Προγράμματος Σπουδών για το Νηπιαγωγείο είναι τα παιδιά:
- να εντοπίζουν και να περιγράφουν θέσεις, διευθύνσεις και διαδρομές στο χώρο ως προς διαφορετικά συστήματα αναφοράς με τη χρήση απλών χωρικών εννοιών.
- Να αναγνωρίζουν οικείους απλούς χάρτες, εντοπίζοντας θέσεις και διαδρομές.
- Να εντοπίζουν, περιγράφουν και αναπαριστούν θέσεις, διευθύνσεις και διαδρομές σε τετραγωνισμένα περιβάλλοντα.
Ως προς το περιεχόμενοτης μέτρησης επιφάνειας και μήκους οι μαθησιακοί στόχοι είναι τα παιδιά:
- Να πραγματοποιούν απλές και έμμεσες συγκρίσεις επιφανειών
- Να χρησιμοποιούν τετράγωνα για να μετρήσουν επιφάνειες
- Να εκτιμούν το μέγεθος απλών επιφανειών και να κάνουν συγκρίσεις
- Να πραγματοποιούν άμεσες και έμμεσες συγκρίσεις όπως και διατάξεις ίσων και άνισων μηκών
- Να πραγματοποιούν επικαλύψεις μηκών και στη συνέχεια επικαλύψεις με επαναλήψεις με μη τυπικές και τυπικές μονάδες
- Να κάνουν απλές εκτιμήσεις και συγκρίσεις
Εκπαιδευτική Ρομποτική: Η Εκπαιδευτική Ρομποτική αναφέρεται στη διδακτική πρακτική κατά την οποία ο εκπαιδευτικός χρησιμοποιώντας τα ρομπότ προσεγγίζει τη γνώση άλλοτε μέσα από τα ρομπότ και άλλοτε για τα ίδια τα ρομπότ. Η εκπαιδευτική ρομποτική συνδυάζει τη μάθηση με το παιχνίδι και έτσι μετατρέπει την εκπαίδευση σε μία διασκεδαστική δραστηριότητα, είναι γνωστό άλλωστε πως η μάθηση επιτυγχάνεται ευκολότερα, ταχύτερα και ουσιαστικότερα όταν συνδυάζεται με το παιχνίδι. Ο εκπαιδευόμενος εξοικειώνεται με τις τεχνολογίες της πληροφορικής, με την ευρεία έννοια του όρου και τις χρησιμοποιεί για να καθορίσει ένα σχέδιο, να το διορθώσει και να βρει μια συγκεκριμένη λύση στο πρόβλημα που του τίθεται, αντιπαραβάλλοντας την άποψη του με τις απόψεις άλλων (Denis & Baron, 1993· Leroux, Nonnon & Ginestie, 2005). Μια ειδική κατηγορία εκπαιδευτικής ρομποτικής συνιστούν τα προγραμματισμένα παιχνίδια τύπου Logo που έχουν ιδιαίτερη εφαρμογή στην προσχολική ηλικία.
Το προγραμματισμένο παιχνίδι: BEE-BOT: Ένα από τα πιο διαδεδομένα προγραμματιζόμενα παιχνίδια είναι το Bee-Bot, το οποίο ενσαρκώνει τη χελώνα Logo και βασίζεται σε αρχές προγραμματισμού της γλώσσας αυτής για τον έλεγχο του ρομπότ δαπέδου. To Βεε-Βοτ έχει τη δυνατότητα να δέχεται απλές εντολές προσανατολισμού (εμπρός ένα βήμα, πίσω ένα βήμα, στρίψε δεξιά ή αριστερά κάποιες μοίρες, π.χ. 90ο). Τα παιδιά μπορούν έτσι να προγραμματίσουν μια διαδρομή πάνω σε ένα δάπεδο. Το ρομπότ δαπέδου Bee-Bot έχει το σχήμα και τα χρώματα της μέλισσας. Ο προγραμματισμός των κινήσεων βρίσκεται στο πάνω μέρος του ρομπότ και στηρίζεται σε ένα σύνολο χρωματιστών πλήκτρων. Τέσσερα πορτοκαλί πλήκτρα εξυπηρετούν την εμπρόσθια και οπίσθια κίνηση και την περιστροφή αριστερά/δεξιά . Το κεντρικό πλήκτρο (‘GO’), χρησιμοποιείται για την εκτέλεση των εντολών του παιχνιδιού. Τα δύο μπλε πλήκτρα εξυπηρετούν διαφορετικές λειτουργίες. Το ένα (‘CLEAR’) χρησιμεύει για την διαγραφή των εντολών από τη μνήμη. Το δεύτερο (‘PAUSE’) παρέχει τη δυνατότητα στο χρήστη να διακόπτει στιγμιαία (1’’) την εκτέλεση των εντολών. Το Bee-Bot διαθέτει και τη δυνατότητα να αφήνει ίχνος κατά τη μετακίνησή του με τη βοήθεια μαρκαδόρω
Tο BEE-BOT, το ΔΕΠΠΣ και το Νέο Αναλυτικό Πρόγραμμα για το Νηπιαγωγείο: Οι μαθησιακές δραστηριότητες που μπορούν να υλοποιηθούν με τo Bee-Bot περιλαμβάνουν: την έξοδο του ρομπότ από λαβύρινθο που μπορεί να είναι ζωγραφισμένος σε κάποιο χαλί ή/και να δημιουργείται από εμπόδια (π.χ. φελιζόλ), μετακίνηση από σημείο σε σημείο (εκτέλεση διαδρομής), σχεδίαση σχημάτων, κ.α. Είναι φανερό ότι το Bee-Bot και άλλα τέτοια παρόμοια συστήματα (Lego NXT) αποτελούν ιδανικά περιβάλλοντα προετοιμασίας μαθητών των πρώτων βαθμίδων της εκπαίδευσης για την εισαγωγή τους σε πολυπλοκότερα και ρεαλιστικότερα περιβάλλοντα. Εκτός από την ευκολία της χρήσης και της διαχείρισης τα εκπαιδευτικά ρομπότ είναι δημοφιλή λόγω της συμβατότητάς τους με το πρόγραμμα σπουδών (ΔΕΠΠΣ) και ειδικότερα με τις έννοιες του προσανατολισμού (εμπρός, πίσω, δεξιά αριστερά) και της απόστασης (μακριά, κοντά), καθώς και της μέτρησης, λόγω της διακριτής φύσης της κίνησης που βασίζεται σε σταθερής απόστασης βήματα και ορθές γωνίες. Για την τεκμηρίωση της ηλικιακής καταλληλότητας επισημαίνεται ότι οι μαθητές κατά τη διάρκεια της μαθησιακής δραστηριότητας χειρίζονται πραγματικό αντικείμενο, χρησιμοποιούν το σώμα τους και κίνηση στο χώρο, ενώ η συνεργασία μεταξύ τους επιτυγχάνεται με φυσικό τρόπο. Η έλλειψη απαίτησης γνώσης γραφής και ανάγνωσης καθώς και χρήσης υπολογιστών καθιστά το Bee-Bot ιδανικό για τις μικρές ηλικίες των 3-6 ετών. Επιπλέον, η πτυχή του παιχνιδιού που εμπεριέχουν τα προγραµµατιζόµενα ρομπότ αποτελεί ένα σηµαντικό παράγοντα θετικού κινήτρου και παρώθησης, κυρίως στην πρωτοβάθμια εκπαίδευση.
Γνωρίζω τις Τ.Π.Ε και Δημιουργώ: Ένα από τα περιεχόμενα του νέου αναλυτικού προγράμματος είναι να γνωρίσουν τα παιδιά βασικές λειτουργίες ενός υπολογιστικού συστήματος, διαφόρων λογισμικών, ψηφιακών συσκευών και προγραμματισμένων παιχνιδιών. Ο στόχος είναι με τη χρήση κατάλληλης ορολογίας (π.χ. εικονίδια, απενεργοποίηση, άνοιγμα, εκτύπωση, αποθήκευση κ.λπ.), να αντιληφθούν ότι όλες οι συσκευές T.Π.Ε. (π.χ. τα προγραμματισμένα παιχνίδια) έχουν βασικές λειτουργίες και ανταποκρίνονται σε εντολές. Στο νέο αναλυτικό πρόγραμμα αναφέρεται και η ενίσχυση μαθησιακών εμπειριών με τη χρήση Τ.Π.Ε. που έχει ως στόχο να αναπτύσσουν την ικανότητα κρίσης, λήψης αποφάσεων, να επιλύουν προβλήματα και να μοντελοποιούν τη γνώση με προγραμματισμένα παιχνίδια και με λογισμικά ανοιχτού τύπου (π.χ. οπτικοποίηση, προσομοίωση, εννοιολ. χαρτογράφηση).
Σύνδεση της Μαθησιακής Περιοχής Τ.Π.Ε με τα Μαθηματικά: Η χρήση Τ.Π.Ε. ενθαρρύνει την ανάπτυξη μαθηματικών εννοιών, όπως η αρίθμηση, οι ταξινομήσεις, τα γεωμετρικά σχήματα, χωρικές σχέσεις, μοτίβα σειροθετήσεις κ.α., μέσα από ευχάριστες δραστηριότητες, κυρίως με τη χρήση λογισμικών και διαδικτυακών εφαρμογών, που ενδιαφέρουν και κινητοποιούν τα παιδιά. Τα παιδιά παίζουν με προγραμματιζόμενα και τηλεκατευθυνόμενα παιχνίδια και πειραματίζονται με έννοιες όπως: παραλληλία, καθετότητα, μπροστά, πίσω δεξιά, αριστερά, ανάμεσα, προβλέπουν και εκτελούν διαδρομές, χρησιμοποιούν το κατάλληλο λεξιλόγιο προσδιορίζοντας τη διαδρομή, κάνουν αφαιρέσεις και προσθέσεις.
Πώς μαθαίνουν τα παιδιά: Ο προγραμματισμός ρομποτικών κατασκευών δημιουργεί ένα εντελώς νέο περιβάλλον εργασίας για τους μαθητές με τα εξής χαρακτηριστικά:
1.Είναι έντονα παρακινητικό, και συνεπώς παράγοντας υψίστης σημασίας για τη διδακτική.
2.Ο προγραμματισμός της συμπεριφοράς των ρομπότ προκύπτει από μεταφορά υπαρχόντων και ήδη γνωστών συμπεριφορών από τους ζώντες οργανισμούς.
3.Αναδεικνύει παραδεκτές προσεγγίσεις και λύσεις και όχι μία και μοναδική σωστή λύση αφού μία συμπεριφορά μπορεί να αποδοθεί με πολλούς τρόπους.
4.Υποστηρίζει μεταγνωστικές διεργασίες μάθησης, δεδομένου ότι η προγραμματιστική δραστηριότητα οδηγεί στη συγκρότηση, την ανάλυση και την εξωτερίκευση νοητικών διεργασιών. Αυτή η προσπάθεια έχει μεταγνωστικό χαρακτήρα αφού μας αναγκάζει να σκεφτόμαστε πάνω στον τρόπο που σκεφτόμαστε και ενεργούμε.
Η Εκπαιδευτική Ρομποτική ανατρέπει τις παλιές θεωρήσεις μάθησης και συνδυάζεται με τα σύγχρονες θεωρήσεις για τη μάθηση καθώς:
- Παρέχει στους μανθάνοντες ευκαιρίες επίλυσης προβλημάτων με προσωπικό νόημα για τους ίδιους μέσω χειρισμού και κατασκευής πραγματικών ή ιδεατών αντικειμένων. Η γνώση που προκύπτει από προβληματικές καταστάσεις δίνει την ευκαιρία στους μαθητές να αναπτύξουν μία ισχυρή εννοιολογική βάση για την ανακατασκευή των γνώσεών τους σε μεταγενέστερο χρόνο.
- Επιτρέπει την ελεύθερη έκφραση και την ανάπτυξη της δημιουργικότητας και φαντασίας.
- Μέσα από την κατασκευή θέτει πραγματικά προβλήματα και παρέχει άμεση ανατροφοδότηση.
- Επιτρέπει την πρόσκτηση γνώσεων και δεξιοτήτων που συνδέονται με πολλά γνωστικά αντικείμενα (και συνεπώς την προώθηση της διεπιστημονικής και διαθεματικής προσέγγισης).
- Δίνει τη δυνατότητα για πιθανή διαισθητική συνειδητοποίηση σύνθετων φαινομένων, όπως η σχέση ανάµεσα στην ταχύτητα, το χρόνο και τη µμετακίνηση.
- Στηρίζεται στη συνεργασία και στην αλληλεπίδραση ατόμων κι ομάδων και στην προώθηση της σκέψης μέσω γνωστικών και κοινωνικογνωστικών συγκρούσεων
- Υποστηρίζει τη διερευνητική μάθηση και ενισχύει τη διερευνητική στάση των μαθητών.
- Δίνει κίνητρα στους μαθητές να μελετήσουν την επιστήμη και την τεχνολογία.
- Εμπλέκει τους μαθητές σε καταστάσεις που απαιτούν από αυτούς να εφαρμόσουν τα μαθηματικά και την επιστήμη και όχι απλά να τα μελετήσουν. Διότι η κατανόηση είναι κάτι περισσότερο από μάθηση, είναι μάθηση και γνώση πώς να εφαρμόσεις αυτό που γνωρίζεις στο πλαίσιο αυτό.
- Καλλιεργείται η επικοινωνία και η λεκτική έκφραση ιδεών μέσα από τη λειτουργία της ομάδας όταν οι μαθητές αναγκάζονται να εξηγήσουν ιδέες και σκέψεις τους.
- Υποστηρίζει τη βιωματική μάθηση.
Ως παιδαγωγική προσέγγιση εγγράφεται στο πλαίσιο του κλασικού εποικοδομιτισμού (constructivism κατά τον Piaget, 1972) και ειδικότερα του κατασκευαστικού εποικοδομισμού (constructionism κατά τον Papert, 1993). Η εποικοδομητική (constructivist) αντίληψη για το φαινόμενο της μάθησης υποστηρίζει ότι το μαθησιακό περιβάλλον θα πρέπει να παρέχει αυθεντικές δραστηριότητες ενταγμένες σε διαδικασίες επίλυσης ανοιχτών προβλημάτων από τον πραγματικό κόσμο, να ενθαρρύνει την έκφραση και την προσωπική εμπλοκή στη μαθησιακή διαδικασία και να υποστηρίζει την κοινωνική αλληλεπίδραση. Επιπλέον ο “κατασκευαστικός” εποικοδομητισμός (constructionism) υποστηρίζει ότι οι μαθητευόμενοι οικοδομούν πιο αποτελεσματικά τη γνώση όταν εμπλέκονται ενεργά στη σχεδίαση και κατασκευή (χειρωνακτική και ψηφιακή) πραγματικών αντικειμένων που έχουν νόημα για τους ίδιους είτε αυτά είναι κάστρα από άμμο, είτε κατασκευές LEGO και προγράμματα υπολογιστών (Papert, 1991). Η μάθηση διαδικασιών ανάλυσης, σχεδιασμού δράσεων και στη συνέχεια η υλοποίησή τους (μέσω μιας μηχανής) συνιστά μια νοητική δεξιότητα υψηλού επιπέδου- που εντάσσεται στη μεγάλη κατηγορία έργων που οι ψυχολόγοι ονομάζουν επίλυση προβλημάτων. (Clements & Sarama, 2002).
Στόχοι
- Εντοπίζουν και καταγράφουν θέσεις διευθύνσεις και διαδρομές στο χώρο ως προς διαφορετικά συστήματα αναφοράς με τη χρήση απλών χωρικών εννοιών
- Να εντοπίζουν, περιγράφουν και αναπαριστούν θέσεις, διευθύνσεις και διαδρομές σε τετραγωνισμένα περιβάλλοντα.
- Να εξοικειωθούν με τον προγραμματισμό του ρομπότ.
- Να κάνουν απλές εκτιμήσεις και συγκρίσεις
Bee Bot
Λογισμικό Kidspiration
Μακέτα παιχνιδιού με διαδρομές για την κίνηση του bee bot (χάρτης γειτονιάς, χάρτινα κτίρια, πλαστικά μικρά αντικείμενα)
Πλαστικοποιημένες καρτέλες συμβόλων (μεγάλες και μικρές από σύμβολα του bee bot, τροχαίας)
Φύλλα εργασίας
1. Σύντομη Περιγραφή Διαδικασίας
Βασικός στόχος μας ήταν να διεγείρουμε το ενδιαφέρον των παιδιών ώστε να εισαχθούν στις έννοιες της ρομποτικής και να εξοικειωθούν με τη λειτουργία και χρήση του ρομπότ. Έτσι σε πρώτη φάση προσπαθούμε να ανιχνεύσουμε τις ιδέες των παιδιών πριν και αφού τους παρουσιάσουμε το ρομπότ (1η Δραστηριότητα). Στη συνέχεια επιδιώξαμε με τη 2η και 3η Δραστηριότητα να εξοικειωθούν τα νήπια με τις κινήσεις του ρομπότ κυρίως τη χρήση των συμβόλων και τον προγραμματισμό απλών και περισσότερο πολύπλοκων κινήσεων. Ακολούθησε η 4η δραστηριότητα που αφορούσε κινήσεις της bee-bot στο χάρτη καθώς και φύλλα εργασίας για να ανιχνεύσουμε τον τρόπο σκέψη και τις αντιλήψει των παιδιών για τον προγραμματισμό του ρομπότ. Στο τέλος των δραστηριοτήτων ελέγξαμε την αναδόμηση των γνώσεων των παιδιών μέσα από τη χρήση kidspiration. Συνολικά σχεδιάστηκαν 4 δραστηριότητες οι οποίες αναλύθηκαν σε επιμέρους δράσεις και η διαδικασία της αξιολόγησης, που εφαρμόστηκαν σε 2 συναντήσεις (συνολικής διάρκειας περίπου 6 ωρών) με μια τάξη νηπιαγωγείου (18 παιδιών ένα εκ των οποίων αντιμετώπιζε Διαταραχές Αυτιστικού Φάσματος) στο 22ο Νηπιαγωγείο Βόλου.
Στάδιο Προετοιμασίας
Ι) Πριν τη παρουσίαση του Βee-Bot
1η Δραστηριότητα: Συζήτηση-Εννοιολογικός χάρτης
Α) Πραγματοποιούμε μια συζήτηση γενικότερου ενδιαφέροντος, θέτοντας ερωτήσεις στα παιδιά προκειμένου να ανιχνεύσουμε τις ιδέες τους σχετικά με τα ρομπότ. Σκοπός είναι η εντόπιση γνωστικών δυσκολιών των παιδιών για τη χρήση, τη λειτουργία, τη γλώσσα εντολών και τη μνήμη του ρομπότ. Ενδεικτικά αναφέρουμε κάποιες ερωτήσεις και τις απαντήσεις των παιδιών.
-Γνωρίζετε τι είναι ένα ρομπότ;
-Έχετε δει ρομπότ; Πού το έχετε δει;
"Στην τηλεόραση, σε βιβλίο, στο Βόρειο Πόλο, στο πάρκο, σε παιχνίδι στον υπολογιστή."
-Τι πιστεύετε ότι κάνει;
"Μιλάει, περπατάει, έχει φώτα, αν πηδάει μπορεί να σπάσει."
-Από τι είναι φτιαγμένο;
"Λάστιχο (εννοούνπλαστικό),γυαλί,σίδερο."
-Πώς γεννήθηκε το ρομπότ;
"Το έφτιαξε ο μπαμπάς, ο μηχανικός."
-Τι μπορεί να κάνει; Πού μπορούμε να το χρησιμοποιήσουμε;
"Στη δουλειά, για ξεσκάλισμα, για να σερβίρει, για να παίζουμε."
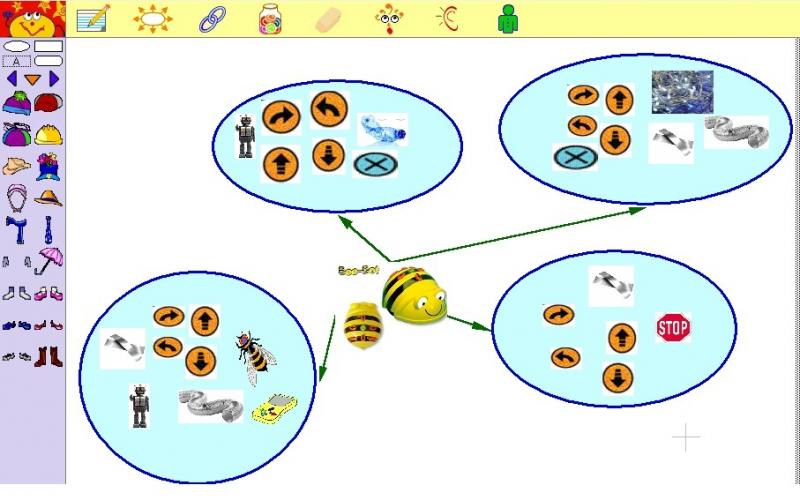
Β) Επιδιώκουμε την κατασκευή εννοιολογικού χάρτη με τη χρήση λογισμικού Kidspiration. Ο εννοιολογικός χάρτης περιλαμβάνει 3 βασικούς άξονες-ερωτήσεις στις οποίες τα παιδιά εκφράζουν τις απόψεις τους σχετικά με το τι είναι ένα ρομπότ, τι κάνει ένα ρομπότ και από τι υλικά αποτελείται ένα ρομπότ. Τα παιδιά χρησιμοποιώντας το λογισμικό βρήκαν το εικονίδιο που αντιστοιχούσε στην ιδέα τους ανάμεσα σε ποικίλα εικονίδια που είχαμε τοποθετήσει στην αρχική επιφάνεια εργασίας του λογισμικού και τα τοποθέτησαν στις τρεις ομάδες που υπήρχαν (μια ομάδα για το τι κάνει, μια άλλη για το τι κινήσεις κάνει και μια άλλη από τι υλικό είναι φτιαγμένο). Αναφέρουμε ενδεικτικές απαντήσεις των νηπίων.

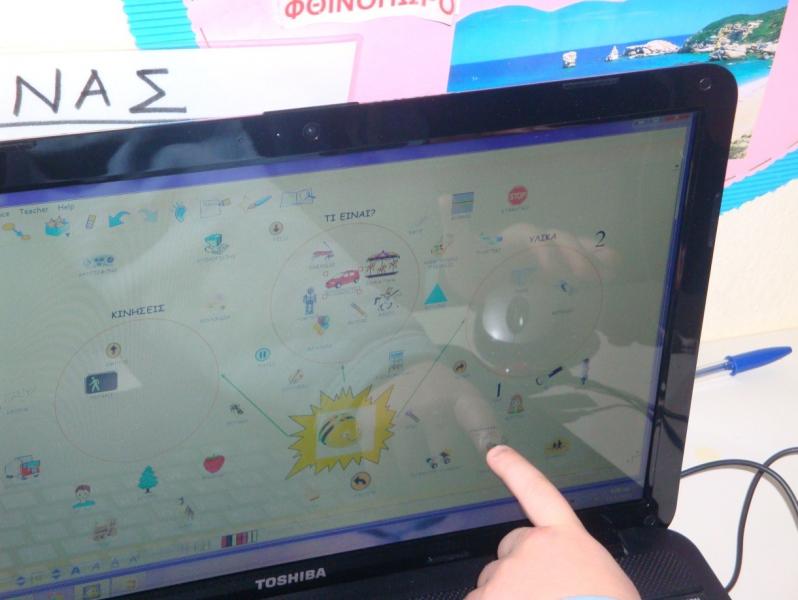
Εικόνα 1: Χρήση λογισμικού kidspiration για ανάδειξη των ιδεών των παιδιών
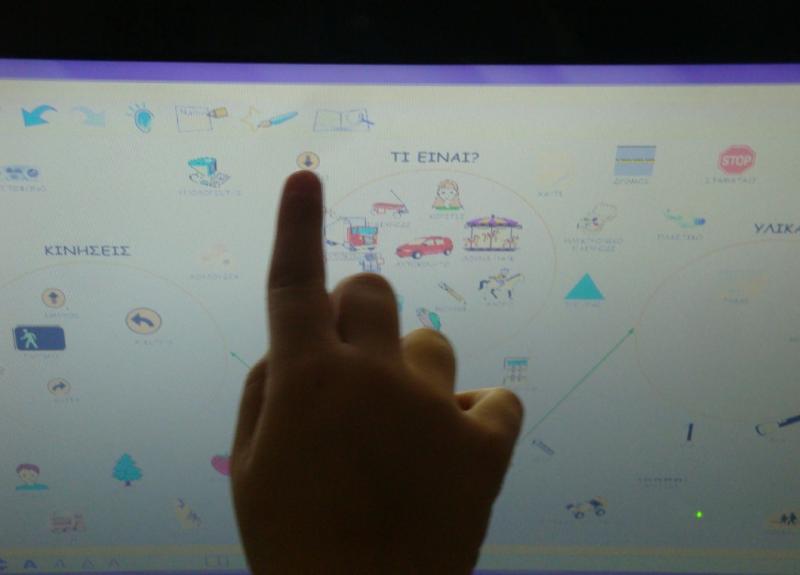
Εικόνα 2: Ενδεικτική επιλογή του νηπίου για τις κατευθύνσεις κίνησης το bee-bot. Η επιλογή του συγκεκριμένου συμβόλου ερμηνεύεται από το νήπιο "προς τα κάτω".
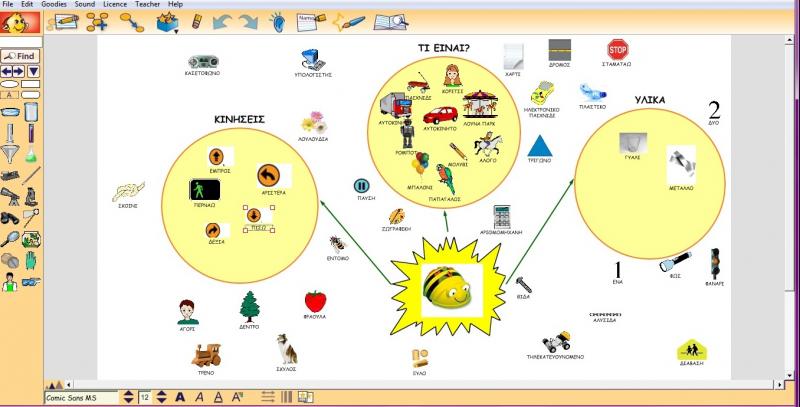
Εικόνα 3: Ο εννοιολογικός χάρτης όπως σχηματίστηκε από τα ίδια τα παιδιά αναπαριστώντας τις ιδέες του
ΙΙ) Μετά την παρουσίαση του Bee-Bot
2η Δραστηριότητα: Ανίχνευση ιδεών– Παιχνίδι παντομίμας
Α) Παρουσιάζουμε στα παιδιά το Bee-bot και συζητάμε μαζί τους τις ιδέες τους για τον τρόπο λειτουργίας του. Σκοπός μας είναι να ανιχνεύσουμε τις αρχικές αναπαραστάσεις των παιδιών. Ενδεικτικά αναφέρουμε κάποια αποσπάσματα από τη συζήτηση με τα νήπια.
-Τι είναι αυτό; Τι σας θυμίζει;
«Ρομπότ»
-Είναι ίδιο με τα άλλα ρομπότ που γνωρίζετε; Τι διαφορετικό έχει;
«Έχει κουμπιά, μπορεί να πετάξει.»
-Έχετε ξαναδεί τέτοια σήματα; Πού;
«Τα βελάκια στο δρόμο, στο τηλεκοντρόλ, σε κάδρο.»
-Πώς κινείται;
«Με ρόδες και μπαταρίες»
-Τις κινήσεις μπορεί να κάνει;
«Αριστερά, δεξιά, μπροστά, κάτω, να πετάξει, να κάνει κολοτούμπες».
-Πώς μπορεί να τα κάνει όλα αυτά;
«Θα του μίλαγα, θα του έλεγα πήγαινε μπροστά,αριστερά,δεξιά».
Β) Στη συνέχεια ζητάμε από τα παιδιά να παίξουν ένα παιχνίδι παντομίμας ανά ζεύγη μιμούμενα τις κινήσεις της bee bot. Σε αυτό το παιχνίδι το ένα παιδί δίνει τις οδηγίες-κατευθύνσεις και το άλλο παιδί εκτελεί τα συγκεκριμένα βήματα. Εδώ συναντήσαμε και τις πρώτες δυσκολίες των παιδιών σχετικά την κίνηση στο χώρο (διαχωρισμός αριστερής και δεξιάς κατεύθυνσης. Στις εντολές αριστερά-δεξιά τα παιδιά δεν στρίβουν το σώμα τους επι τόπου (όπως κάνει η bee bot) ώστε να αλλάξουν κατεύθυνση, αλλά κάνουν πλάγια βήματα. Απ’ ότι φάνηκε και στη συνέχεια αυτή η αδυναμία-σύγχυση θα δυσκολέψει την κατανόηση των κινήσεων της bee-bot συγκεκριμένα στην αλλαγή κατεύθυνσης.

Εικόνα 4: Παιχνίδι παντομίμας
3η Δραστηριότητα: Εξοικείωση με τα σύμβολα της bee-bot
Στόχος της συγκεκριμένης δραστηριότητας ήταν να γνωρίσουν τα νήπια τις κατευθύνσεις προς τις οποίες μπορεί να κινηθεί το ρομπότ (μπρος, πίσω, αριστερά, δεξιά), να αναγνωρίσουν τα σύμβολά του, καθώς και να κατανοήσουν τη σταθερότητα του μήκους βήματος του ρομπότ (η απόσταση που διανύει το ρομπότ σε κάθε του κίνηση είναι 15cm). Έτσι χωρίσαμε τη συγκεκριμένη δραστηριότητα σε 3 υπο-δραστηριότητες.
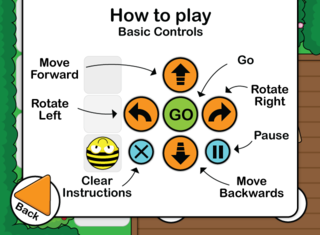
Εικόνα 5: Τα σύμβολα όπως υπάρχουν πάνω στο ρομποτ beebot
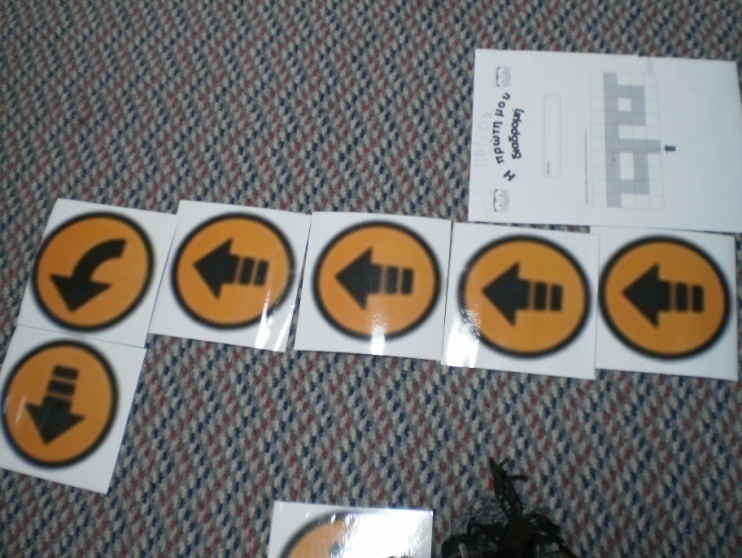
Α) Χρησιμοποιούμε καρτέλες με σύμβολα (βελάκια ίδια με αυτά που υπάρχουν πάνω στο ρομπότ) για να κατανοήσουν τη χρήση του κάθε συμβόλου και τ’ αντιπαραβάλουμε με άλλα γνωστά σήματα της καθημερινότητας.

Εικόνα 6: Αντιπαραβολή σημάτων bee-bot με σύμβολα της τροχαίας
Β) Στο δεύτερο στάδιο προσπαθήσαμε να εξοικειωθούν τα παιδιά με το βήμα της bee-bot, βλέποντας τη να κινείται δίπλα στην τετραγωνισμένη καρτέλα και να καταλάβουν έτσι ότι το βήμα της είναι σταθερό (15 cm). Βέβαια δεν δώσαμε μεγάλη βαρύτητα στη μονάδα μέτρησης καθώς τα παιδιά δεν είναι αρκετά εξοικειωμένα.



Εικόνα 7: βήμα της bee-bot


Εικόνα 8: επανάληψη της δραστηριότητας πραγματοποιώντας 2 ή 3 διαδοχικά βήματα.
Γ) Στο τρίτο στάδιο της δραστηριότητας τα ίδια τα παιδιά κάνουν σχεδιασμένες από εμάς διαδρομές στο δάπεδο ακολουθώντας τα σύμβολα και κάνοντας βήμα ίδιο με αυτό της Bee bot σε απόσταση. Δίνεται έτσι ξανά η δυνατότητα στα παιδιά το ένα να καθοδηγεί το άλλο. Σκοπός είναι η βιωματική προσέγγιση και εμπειρία της κίνησης του ρομπότ. Παρατηρήθηκε και πάλι δυσκολία των νηπίων στην επι τόπου στροφή του σώματος τους.





Εικόνα 9 (Α-Ε): Σχεδιασμένες διαδρομές από τα παιδιά
4η Δραστηριότητα: Προγραμματισμός διαδρομών από τα νήπια
Α) Στη συγκεκριμένη δραστηριότητα προσπαθήσαμε τα νήπια να εξοικειωθούν με τον προγραμματισμό μιας κίνησης της bee-bot (απλή κίνηση: μόνο μπροστά, μόνο δεξιά κ.α). Τα παιδιά βοηθιούνται με την ταυτόχρονη χρήση καρτελών που απεικονίζουν τα σύμβολα της όπως υπάρχουν πάνω στο ρομπότ. Επιπλέον σε αυτό το στάδιο πρωταρχικός στόχος ήταν να κατανοήσουν τη χρήση των συμβόλων που είναι απαραίτητα για τις εντολές που πρέπει να δοθούν έτσι ώστε να προγραμματιστεί κάθε φορά σωστά η κίνηση του bee bot. Σημαντικό ήταν τα νήπια να κατανοήσουν οτι πριν από τον προγραμματισμό κάθε κίνησης πρέπει να πατηθεί το μπλε κουμπί clear, έπειτα το κουμπί για τη μια κίνηση (αργότερα πολλές) και στο τέλος το πράσινο κουμπί go, έτσι ώστε τελικά να εκτελέσει την προγραμματισμένη κίνηση. Σ’ αυτό το σημείο να σημειωθεί πως μετατρέψαμε τα σύμβολα που υπήρχαν στην bee bot (κολλήσαμε πλαστικοποιημένα μικρά σύμβολα που είχαμε εκτυπώσει) μ’ αυτά που υπάρχουν στο καινούργιο μοντέλο της bee bot.



Εικόνα 10: Προγραμματισμός απλών διαδρομών από τα παιδιά
Β) Αφού τα παιδιά κατανόησαν τη χρήση των συμβόλων (Clear, Go) και τον προγραμματισμό μιας κίνησης, ακολούθησε ο προγραμματισμός διαδρομής σε πιο πολύπλοκη κίνηση (ευθεία και στροφή σε συνδυασμό). Είναι χαρακτηριστικό ότι σε αυτό το στάδιο παραλείψαμε τη χρήση των καρτελών (Clear, Go) και χρησιμοποιήσαμε μόνο τις καρτέλες με τα σύμβολα κατεύθυνσης, αφού τα παιδιά από το προηγούμενο στάδιο φαίνεται να κατανόησαν πλήρως τη χρήση των Clear & Go. Υπήρξαν παιδιά που χρειάστηκαν καθοδήγηση βήμα-βήμα ενώ άλλα παιδιά κατάφεραν από την αρχή τον προγραμματισμό χωρίς δική μας βοήθεια.



Εικόνα 11: Προγραμματισμός κίνησης με καθοδήγηση

Εικόνα 12: Προγραμματισμός κίνησης χωρίς τη δική μας βοήθεια
Κυρίως Πορεία
Τίτλος δραστηριότητας: Η Bee bot και η πρόσκληση στη κοπή της Πρωτοχρονιάτικης πίτας
Αφόρμηση
Προκειμένου να ενεργοποιήσουμε το ενδιαφέρον των παιδιών αφηγούμαστε μια ιστορία στην οποία παρουσιάζεται η εξής πρόκληση: Η δασκάλα θέλει να καλέσει στο σχολείο τους γονείς των παιδιών στη κοπή της Πρωτοχρονιάτικης πίτας με τη βοήθεια του ταχυδρόμου (bee bot) που θα πρέπει να πάει τις προσκλήσεις στο σπίτι του κάθε παιδιού. Στις δραστηριότητες που ακολουθούν χρησιμοποιήσαμε προγραμματισμένες διαδρομές σε χάρτη που προσομοιάζει στη γειτονιά των παιδιών. Πάνω στο χάρτη βρίσκονται διασκορπισμένα κτίρια που αντιστοιχούν στα σπίτια των παιδιών καθώς και διάφορα δημόσια κτίρια και καταστήματα.
1η Δραστηριότητα: Απλές Διαδρομές
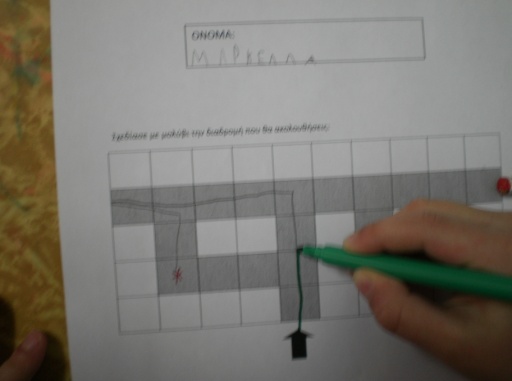
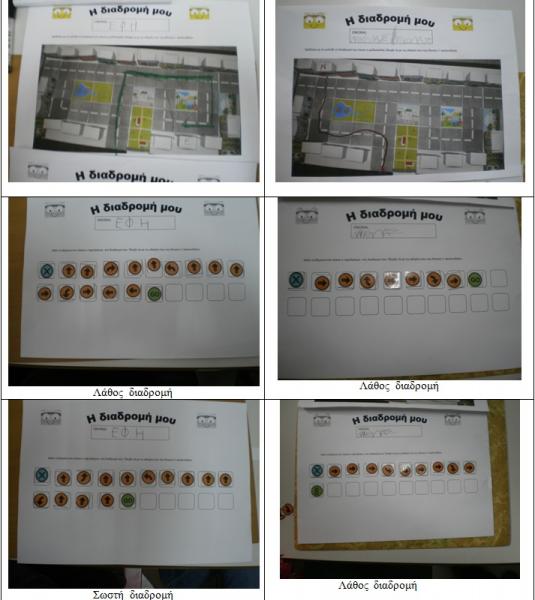
Α) Τα παιδιά σχεδιάζουν απλές διαδρομές σε φύλλο εργασίας. Δώσαμε στα παιδιά ένα φύλλο εργασίας στο οποίο υπάρχουν διαφορετικά σημεία-στόχοι και πρέπει τα παιδιά με το μολύβι τους να κάνουν τη διαδρομή. Όλα τα παιδιά έχουν το ίδιο σημείο-έναρξη. Στόχος ήταν η προσπάθεια αναπαράστασης της κίνησης στο χαρτί από τα παιδιά. Η δραστηριότητα αυτή εκτελέστηκε με σχετική ευκολία από τα νήπια ενώ υπήρξε και κάποιο νήπιο που εκτέλεσε αρχικά λάθος διαδρομή, όμως κατάλαβε το λάθος και το διόρθωσε. Τέλος εντύπωση προκαλεί η επιλογή ενός παιδιού να διαλέξει τη «δύσκολη» διαδρομή για τον στόχο του.

Εικόνα 13: Σχεδιασμός διαδρομής από δυο παιδιά με ίδια αφετηρία αλλά διαφορετικό σημείο στόχο στο χάρτη.
Εικόνα 14: Διόρθωση λάθους διαδρομής από το νήπιο

Εικόνα 15: Επιλογή «δύσκολης» διαδρομής
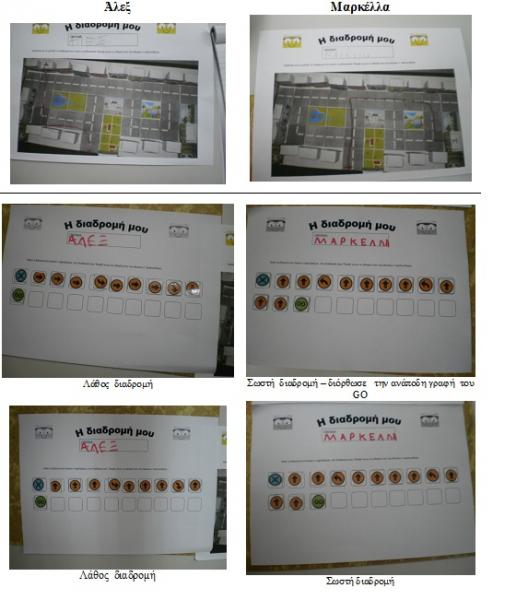
Β) Από το στάδιο αυτό και μετά τα παιδιά χωρίστηκαν σε ομάδες των 4 και απασχολήθηκαν ξεχωριστά σε ήσυχες γωνιές. Στο δεύτερο στάδιο της δραστηριότητας τα παιδιά «μεταφέρουν» τη διαδρομή που σχεδίασαν στο φύλλο εργασίας στο πάτωμα. Τα παιδιά βλέποντας το φύλλο εργασίας, χρησιμοποιούν τα σύμβολα–κάρτες για να κάνουν την ίδια διαδρομή. Στόχος μας ήταν να κατανοήσουν τις διαφορετικές φάσεις της κίνησης που απαρτίζουν μια συγκεκριμένη διαδρομή με απλό τρόπο πριν προγραμματίσουν το ρομπότ. Στόχος μας ήταν ουσιαστικά να δούμε κατά πόσο τα παιδιά μπορούν να κατανοήσουν τη διαδρομή που σχεδίασαν στο χαρτί συμβολοποιώντας τη. Στο πρώτο σχήμα βλέπουμε τη λάθος πραγματοποίηση της διαδρομής από το νήπιο, καθώς πραγματοποιεί 3 αντί για 4 βήματα εμπρός. Υποθέτουμε ότι το παιδί πραγματοποιεί «ένα προς ένα» αντιστοίχηση των τετραγώνων του φύλλου εργασίας με τις καρτέλες και δεν αντιλαμβάνεται ότι στο ίδιο τετράγωνο αντιστοιχούν δυο εντολές (του βήματος και της στροφής).

Εικόνα 16: σχεδιασμός διαδρομής με τη βοήθεια καρτών.
Γ) Στο τρίτο στάδιο τα νήπια πραγματοποίησαν την προηγούμενη διαδρομή που σχεδίασαν στο φύλλο εργασίας και τη βοήθεια των καρτών/συμβόλων με προγραμματισμό της beebot. Στόχος μας εδώ ήταν τα νήπια να κατανοήσουν πλήρως τη γλώσσα επικοινωνίας του bee bot και να δημιουργήσουν αναπαραστάσεις κίνησης του ρομπότ, που θα τα βοηθήσει να προγραμματίσουν με επιτυχία τη bee bot για τη συγκεκριμένη διαδρομή. Εδώ τα νήπια μπορούσαν στην πλειοψηφία τους ν’ αντιστοιχήσουν τα σύμβολα από την καρτέλα στο προγραμματισμό της bee bot για τη διαδρομή τους. Κάποια βέβαια και πάλι παρέλειπαν κάποιο βήμα από την διαδρομή τους στον προγραμματισμό τελικά της bee bot, συνήθως αυτό ήταν το βήμα πρίν τη στροφή.
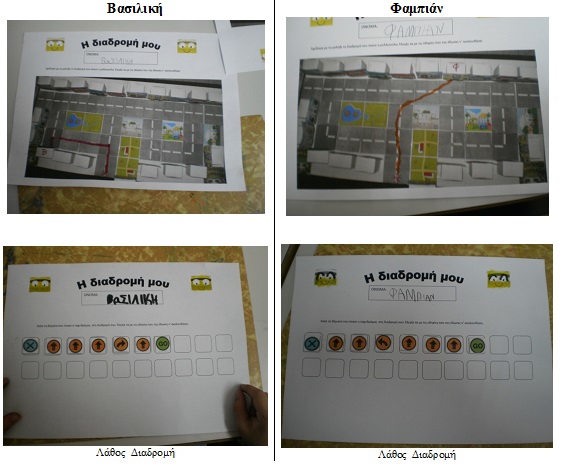
2η Δραστηριότητα: Προγραμματισμός απλών διαδρομών. Διαδρομή ταχυδρομείο-σπίτι
Στη συγκεκριμένη δραστηριότητα τα παιδιά αφού έχουν ακούσει και έχουν πειραματιστεί σε κάποιο βαθμό στα προηγούμενα στάδια με τη λειτουργία του ρομπότ, καλούνται να προγραμματίσουν το bee bot έτσι ώστε αυτό να εκτελέσει συγκεκριμένες απλές διαδρομές στο χάρτη. Ειδικότερα αυτά που διεξάγονται σε αυτή τη δραστηριότητα είναι τα εξής: Το κάθε παιδί βλέποντας τα σπίτια που υπάρχουν στο χάρτη, επιλέγει ένα από αυτά και τοποθετεί μία καρτέλα με το όνομά του στο σπίτι που επέλεξε δείχνοντας με αυτό τον τρόπο πως αυτό είναι το σπίτι του. Τα σπίτια είναι τοποθετημένα έτσι ώστε από το ταχυδρομείο να προκύπτουν απλές διαδρομές (4 κινήσεις το μέγιστο και μόνο μια στροφή). Στη συνέχεια λέμε στα παιδιά πως ο ταχυδρόμος – ρομπότ πρέπει να πάει από το ταχυδρομείο στο σπίτι κάθε παιδιού για να αφήσει την πρόσκληση (η αφετηρία είναι κοινή για όλα τα παιδιά και ο προορισμός διαφορετικός). Έτσι, το κάθε παιδί προγραμματίζει τις κινήσεις του ταχυδρόμου – ρομπότ με σκοπό το bee bot να εκτελέσει τη συγκεκριμένη διαδρομή πάνω στο χάρτη. Η δραστηριότητα ολοκληρώνεται όταν όλα τα παιδιά έχουν δώσει εντολές στο ρομπότ να ακολουθήσει τη διαδρομή η οποία είναι προκαθορισμένη και εκτελείται πάνω στην επιφάνεια του χάρτη. Στόχος ήταν να προγραμματίσουν την κίνηση του ρομπότ πάνω σε χάρτη (μακέτα) με συγκεκριμένα τετράγωνα ίσα με το βήμα της bee bot για μία συγκεκριμένη και απλή διαδρομή έτσι ώστε να φτάσει η bee bot με επιτυχία στον τελικό προορισμό. Στόχος ήταν επίσης να κατανοήσουν πως οι κινήσεις ενός ρομπότ βρίσκονται υπό τον πλήρη έλεγχο από τον άνθρωπο. Στις περιπτώσεις λάθος προγραμματισμού τα παιδιά προσπαθούσαν να καταλάβουν τι πήγε λάθος και επαναπρογραμμάτιζαν το ρομπότ με τη διαφορετική εκδοχή κατά την κρίση τους. Επιπλέον για τα παιδιά που δυσκολευόντουσαν στον προγραμματισμό χρησιμοποιήθηκαν οι κάρτες σύμβολα βοηθητικά. Μ’ αυτόν τον τρόπο ολοκληρώθηκε η πρώτη μέρα εφαρμογής δραστηριοτήτων με τα παιδιά.




Εικόνα 17 (Α,Β,Γ,Δ): Προγραμματισμός διαδρομής ταχυδρομείο –σπίτι.


Εικόνα 16: Κάποια παιδιά που δυσκολεύτηκαν στον προγραμματισμό χρησιμοποίησαν τις βοηθητικές κάρτες με τα σύμβολα
3η Δραστηριότητα: Περίπλοκες διαδρομές. Διαδρομή σπίτι-σχολείο
Την δεύτερη μέρα επίσκεψης μας στο νηπιαγωγείο τα παιδιά αφού είχαν κατανοήσει τις κινήσεις που μπορεί να κάνει η bee bot και είχαν εξοικειωθεί με τον προγραμματισμό σε απλές διαδρομές, στόχος μας την δεύτερη μέρα ήταν να προγραμματίσουν τη bee bot για πιο περίπλοκες διαδρομές (12 κινήσεις μέγιστο και περισσότερες στροφές), να εντοπίσουν, να περιγράψουν διευθύνσεις και διαδρομές σε περίπλοκα τετραγωνισμένα περιβάλλοντα. Ταυτόχρονα ν’ αναπτύξουν δεξιότητες επίλυσης προβληματισμού στη περίπτωση λάθου ς προγραμματισμού της διαδρομής. Στο προηγούμενο στάδιο τα παιδιά με τη βοήθεια του ταχυδρόμου πήγαν τις προσκλήσεις για τη γιορτή της πρωτοχρονιάτικης πίτας. Σ’ αυτό το στάδιο κάθε παιδί προγραμμάτισε τη bee-bot να κάνει την διαδρομή από το σπίτι του στο σχολείο για να πάει στη γιορτή. Στη διαδρομή αυτή ήταν έτσι τοποθετημένα τα κτίρια έτσι ώστε η διαδρομή που προέκυπτε να είναι πιο περίπλοκη. Στα παιδιά που είχαν εξοικειωθεί καλά με την απλή διαδρομή τους δόθηκε περίπλοκη διαδρομή, ενώ στα παιδιά που αντιμετώπισαν δυσκολίες τους δόθηκε ξανά απλή διαδρομή για να εμπεδώσουν καλύτερα τον προγραμματισμό επανεξετάζοντας τις κινήσεις και δημιουργώντας τους κατάσταση προβληματισμού. Παρατηρήσαμε χαρακτηριστικά πως το νήπιο που του έχει ανατεθεί περίπλοκη διαδρομή αντιλαμβάνεται μόνο του το λάθος που έχει κάνει και ξαναπρογραμματίζει το bee bot, κάνει κάποιες δοκιμασίες και στο τέλος με επιτυχία θα φτάσει στο σχολείο (τελικός στόχος). Τα παιδιά εξέφρασαν σε κάποιες περιπτώσεις δυο διαφορετικές πιθανές διαδρομές.
4η Δραστηριότητα: Φύλλα εργασίας
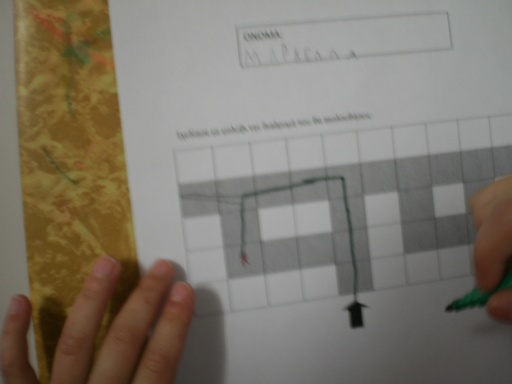
Α) Δίνουμε στα παιδιά φύλλο εργασίας στο οποίο υπάρχει ο χάρτης της γειτονιάς με τα σπίτια των παιδιών και το κάθε παιδί πρέπει να σχεδιάσει με το μολύβι τη διαδρομή που έκανε. Στόχος ήταν να σχεδιάσουν μια διαδρομή σε χαρτί και να σκεφτούν εναλλακτικές διαδρομές. Είναι ουσιαστικά βοηθητική δραστηριότητα για το επόμενο στάδιο. Τα παιδιά δεν αντιμετώπισαν καμία δυσκολία σ’ αυτή τη φάση και συνήθως επέλεγαν την πιο περίπλοκη διαδρομή.
Β) Στη συνεχεία σε ένα άλλο φύλλο εργασίας τα παιδιά θα πρέπει να σχεδιάσουν τη διαδρομή χρησιμοποιώντας τα ίδια σύμβολα (μικρά πλαστικοποιημένα τετράγωνα) που υπάρχουν και στη bee bot. Στόχος μας ήταν να συμβολοποιήσουν τις διάφορες φάσεις κίνησης της beebot απεικονίζοντας αυτές στο χαρτί. Παρατηρήθηκε πως άλλα παιδιά βάλανε τα σύμβολα όπως ακριβώς θα τα βλέπανε στη beebot και άλλα τα τοποθέτησαν όπως ήταν η κατεύθυνση των τετραγώνων στο χαρτί. Τα περισσότερα παιδιά κατανόησαν την κίνηση στο σύνολο της. Με συζήτηση μας περιέγραψαν τις σκέψεις τους , επανεξέτασαν τα λάθη τους με σκοπό να επανατοποθετήσουν τα καρτελάκια επιτυχώς.
Αξιολόγηση
Χρήση kidspiration ώστε τα παιδιά να εκφράσουν τις νέες αντιλήψεις του για το ρομπότ μετά το τέλος των δραστηριοτήτων. Συγκεκριμένα δείχνουν διαφοροποίηση μεταξύ των αρχικών και τελικών αναπαραστάσεων των παιδιών για το προγραμματιζόμενο παιχνίδι. Στις τελικές αναπαραστάσεις τα παιδιά φαίνεται να έχουν σχηματίσει κάποια ιδέα για το προγραμματιζόμενο παιχνίδι. Αν και τα περισσότερα παιδιά εξακολουθούν να αποδίδουν ανιμιστική ιδιότητα στο παιχνίδι Bee-Bot, εισάγουν πλέον με πιο συστηματικό τρόπο στοιχεία που σχετίζονται με τη διαδικασία προγραμματισμού για τον έλεγχο και το χειρισμό του με τη συνακόλουθη χρήση μιας συμβολικής γλώσσας. Η κατανόηση των βασικών εννοιών χωρικού προσανατολισμού και των σχέσεων, τόσο μεταξύ τους όσο και με διαφορετικά σταθερά σημεία αναφοράς στο χώρο, είναι ένα σύνηθες πρόβλημα που αντιμετωπίζουν τα παιδιά στην ηλικία των 4-5 χρόνων. Συχνά μπορούν επιτυχώς να προσδιορίσουν χωρικές αναφορές, σε σχέση με τον εαυτό τους, αλλά όχι σε σχέση με άλλα άτομα ή αντικείμενα στον ίδιο χώρο. Γι’ αυτό το λόγο αντιμετώπισαν προβλήματα στην κατανόηση της αλλαγής κατεύθυνσης της Bee-bot. Έτσι οι δραστηριότητες που αφορούν σε κίνηση «μπροστά»-«πίσω», «δεξιά»-«αριστερά» κατά την κίνηση προγραμματίζονται με σημείο αναφοράς τον εαυτό τους και όχι τη σχετική θέση του ρομπότ στο χώρο. Στις εκφράσεις μόνο λίγων παιδιών φαίνεται να συνειδητοποιούν ότι οι κινήσεις της beebot ελέγχονται από τον άνθρωπο.
Φύλλα εργασίας
Η τάξη είναι προτιμότερο να χωρίζεται σε ομάδες σε τέτοιες εφαρμογές και τα παιδιά να δουλεύουν συνεργατικά αλλά και σε ατομικό επίπεδο να υπάρχει υποστήριξη από τον δάσκαλο. Σημαντική είναι η βιωματική προσέγγιση της κίνησης του ρομπότ σε αρχικό στάδιο πριν δείξουμε στα παιδιά πως κινείται το ίδιο. Εδώ πρέπει να δοθεί αρκετή έμφαση στην επι τόπου στροφή με το σώμα και πως υπάρχει δυνατότητα στροφής παραμένοντας ακριβώς στο ίδιο σημείο, το ίδιο που κάνει και η beebot. Τα παιδιά με τέτοιες δραστηριότητες αναπτύσσουν δεξιότητες κριτικής σκέψης, λήψης αποφάσεων και επίλυσης προβλημάτων. Θα ήταν καλύτερο η εφαρμογή αυτή να είχε πραγματοποιηθεί σε 3 μέρες αυτό δεν ήταν δυστυχώς εφικτό λόγω έλλειψης χρόνου.